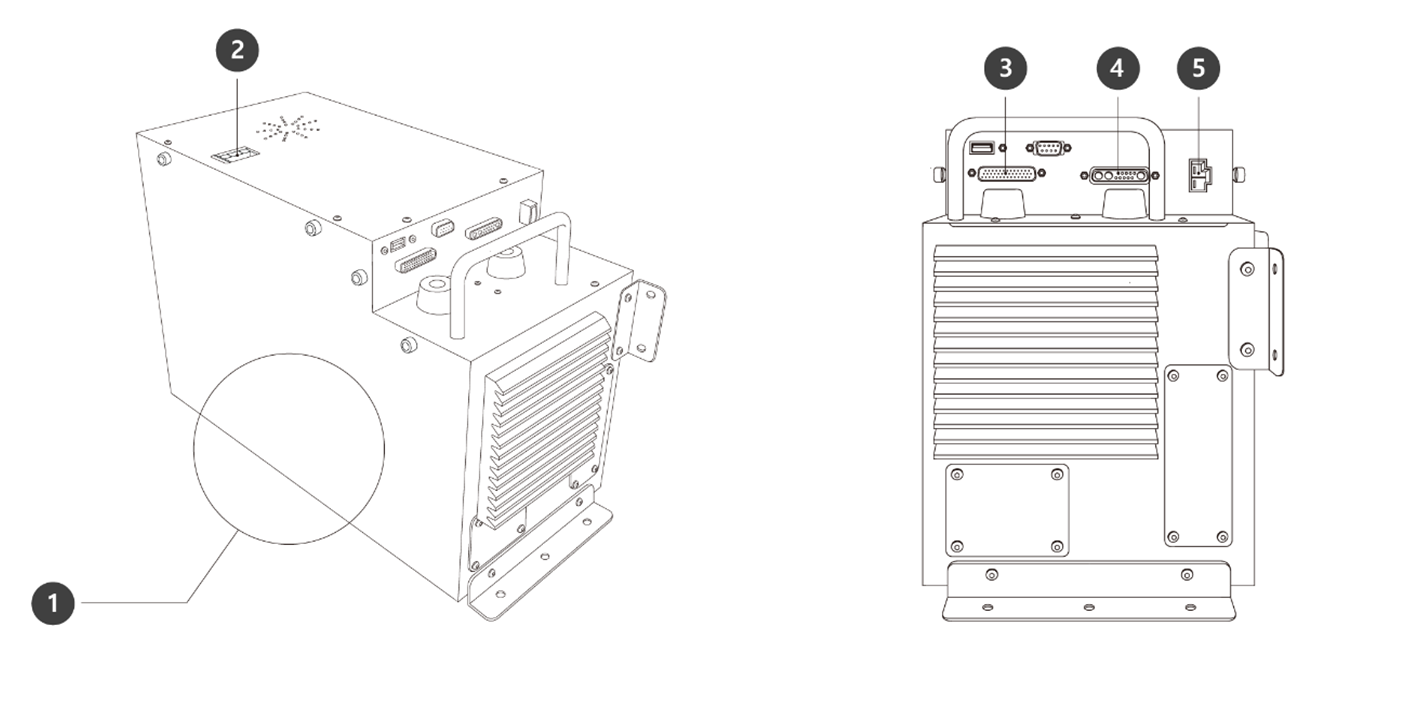
Noms et fonctions
DC Contrôleur (CS-02)
|
N° |
Élément |
Description |
|
1 |
Borne de connexion E / S (interne) |
Utilisé pour connecter le contrôleur ou les périphériques. |
|
2 |
Interrupteur |
Utilisé pour allumer/éteindre l'alimentation principale du contrôleur. |
|
3 |
Boîtier d'apprentissage borne de connexion de câble |
Utilisé pour connecter le câble du boîtier d'apprentissage au contrôleur. |
|
4 |
Robot borne de connexion de câble |
Utilisé pour connecter le câble du robot au contrôleur. |
|
5 |
Borne de connexion d'alimentation |
Utilisé pour connecter l'alimentation du contrôleur. |
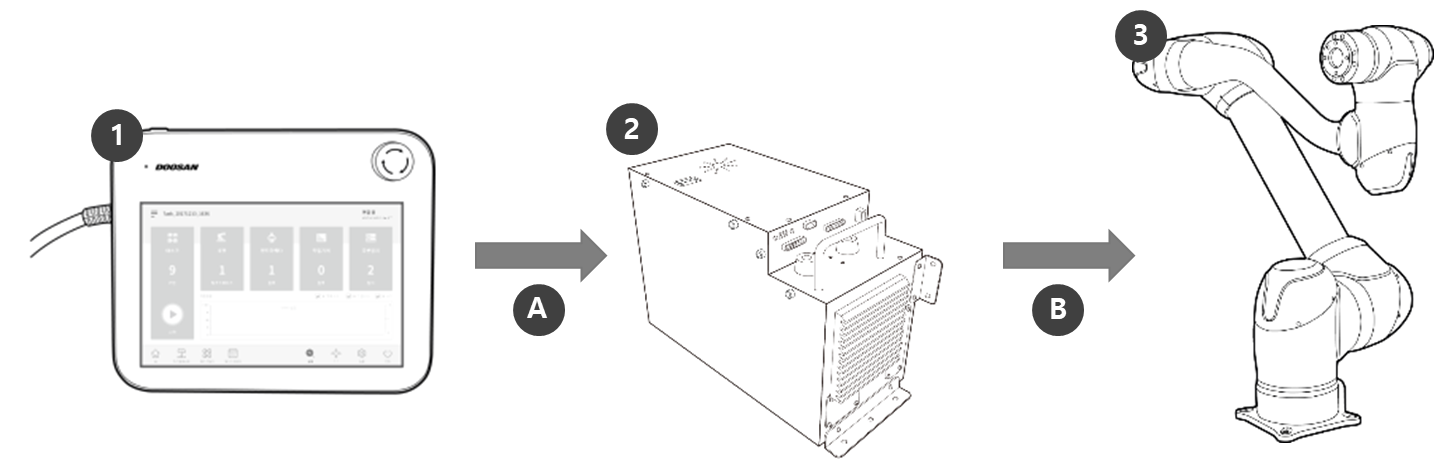
Configuration du système
|
N° |
Élément |
Description |
|---|---|---|
|
1 |
Boîtier d'apprentissage |
il s'agit d'un dispositif permettant de gérer l'ensemble du système, capable d'apprendre au robot des positions particulières et de configurer les paramètres relatifs au manipulateur et au boîtier de contrôle. |
|
2 |
Contrôleur |
règle le mouvement du robot en fonction de la position ou du mouvement défini par le boîtier d'apprentissage. Il dispose de plusieurs ports d'E/S permettant de connecter et d'utiliser différents types d'équipements et d'appareils. |
|
3 |
Manipulateur |
il s'agit d'un robot industriel collaboratif pouvant réaliser des tâches de transport et d'assemblage à l'aide de divers outils. |
|
A |
Commande/
|
|
|
B |
Puissance/
|
|
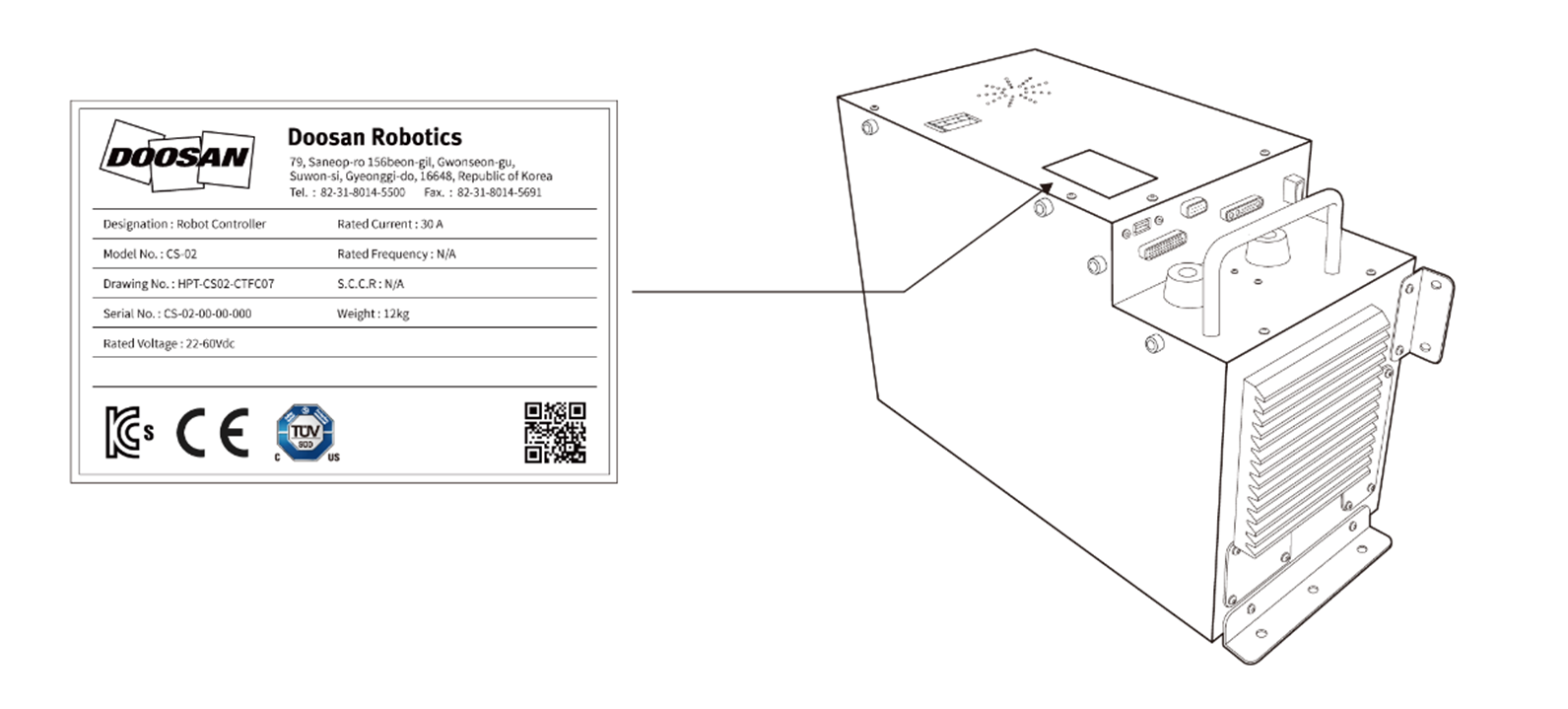
Puissance nominale et étiquettes