Pour déplacer le robot en fonction de l'outil du robot, procédez comme suit :
-
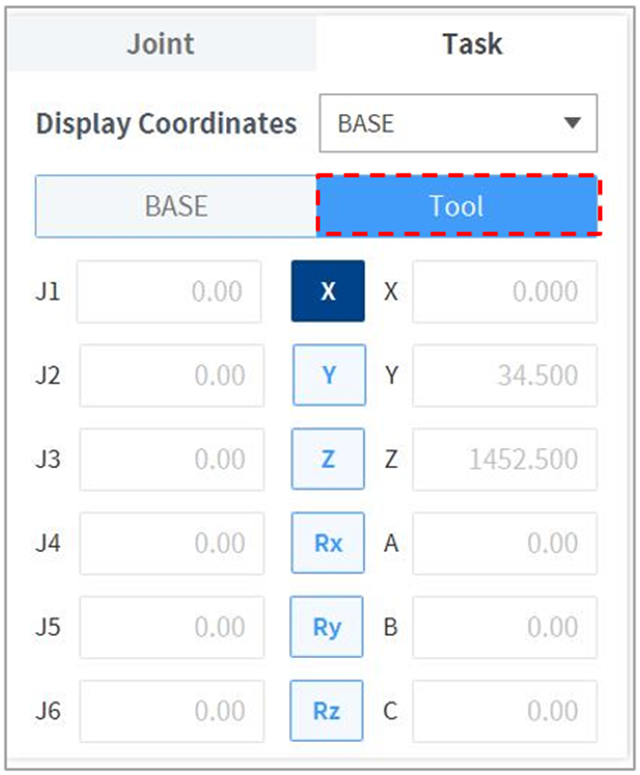
Sélectionnez l'onglet Task (Tâche) dans l'écran Jog.
-
Sélectionnez Base ou Monde comme coordonnées d'affichage et réglez l'outil selon le point de référence des coordonnées de tâche.
-
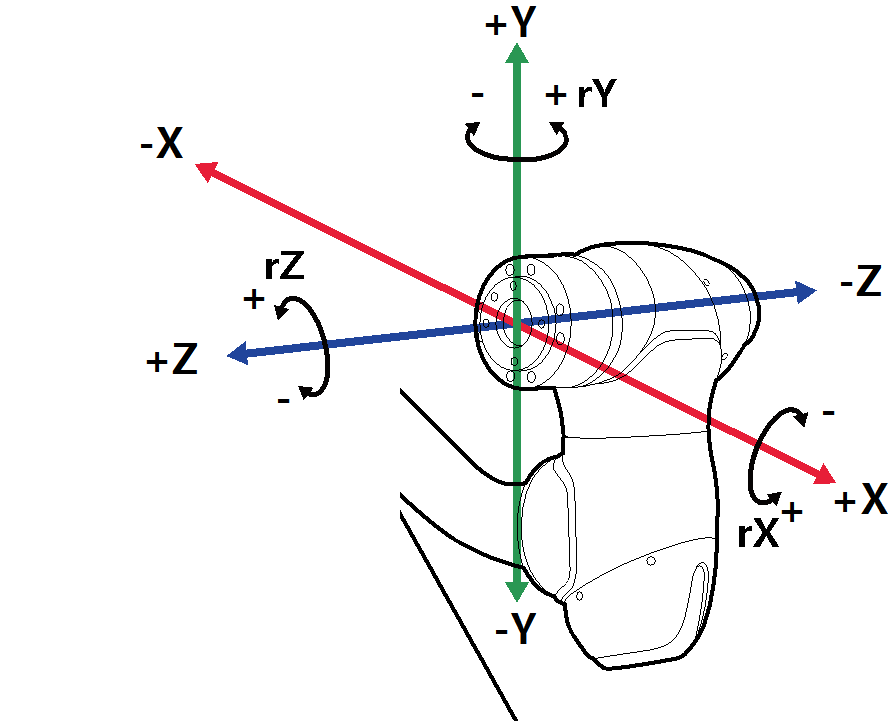
Sélectionnez les Tool Coordinates (Coordonnées Outil) pour procéder au déplacement.
-
Maintenez enfoncé le bouton Direction(


Remarque
-
La zone de sécurité n'est pas appliquée en mode virtuel.
-
Rx, Ry et Rz sont exécutés selon la TCP (position centrale de l'outil).