Esta función resulta útil si la pieza de trabajo está alineada con el TCP en la dirección de un eje para impartir enseñanza a la pieza de trabajo. Para llevar a cabo la enseñanza después de bloquear la postura, utilice la función de enseñanza directa de plano o línea bloqueada con los botones de la cabina.
Para alinear la TCP del robot en función del objetivo, siga las siguientes indicaciones:
-
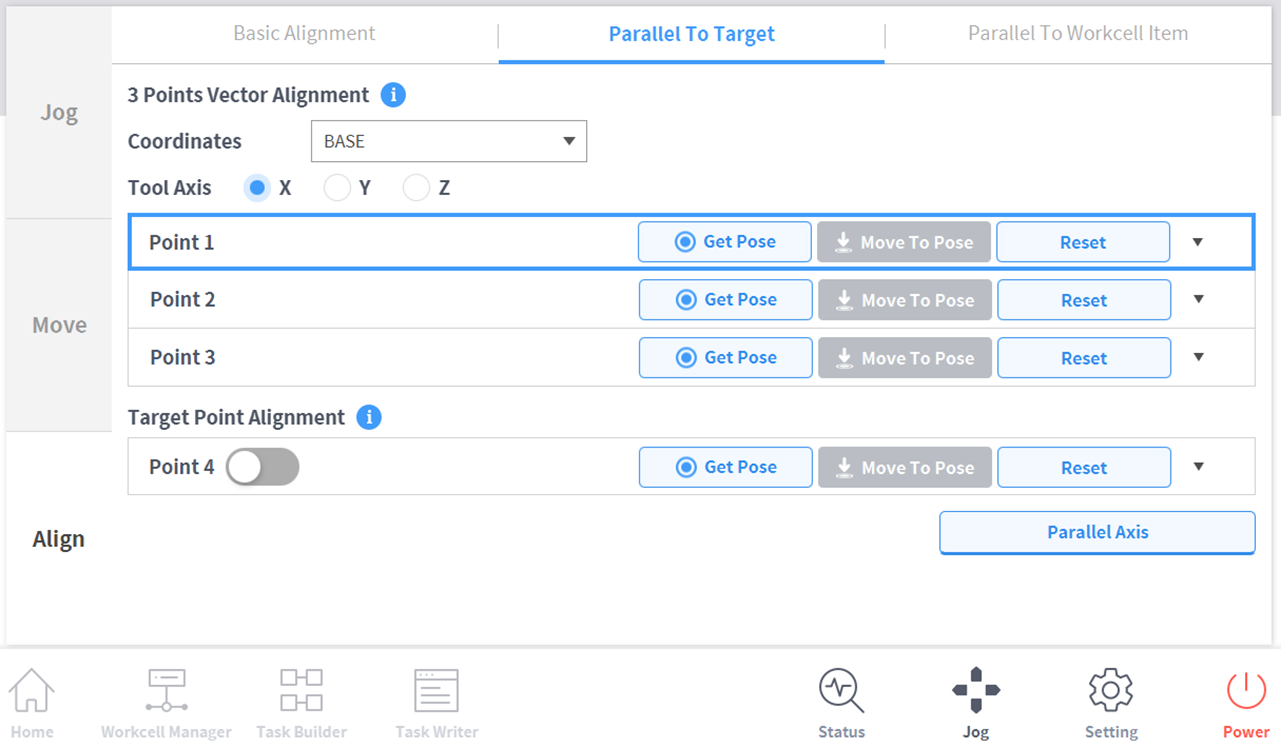
Seleccione la pestaña Alinear y luego la pestaña Paralelo al objetivo.
-
Seleccione las coordenadas de referencia para alineación.

-
Seleccione el eje de la herramienta a alinear.

-
Mueva el robot en la dirección que desee y toque el botón Punto 1.
-
Toque el botón Guardar postura del Punto 1.Los Punto 2 y Punto 3 se configuran de la misma manera. Cuando se completa la configuración, se establece un área vectorial virtual basada en los tres puntos.
-
(Opcional) Para configurar la dirección y la posición del TCP juntas, pulse el botón de alternancia del Punto 4 , mueva el robot a la posición que desea y toque el botón "Guardar postura".
-
Mantenga pulsado el botón Alinear eje para alinear el eje.Ubique la cabeza de 6 ejes 150 mm por encima del objetivo en la dirección del eje Z.