Para verificar o probar la información de E/S, toque el botón "Estado" en el menú principal.
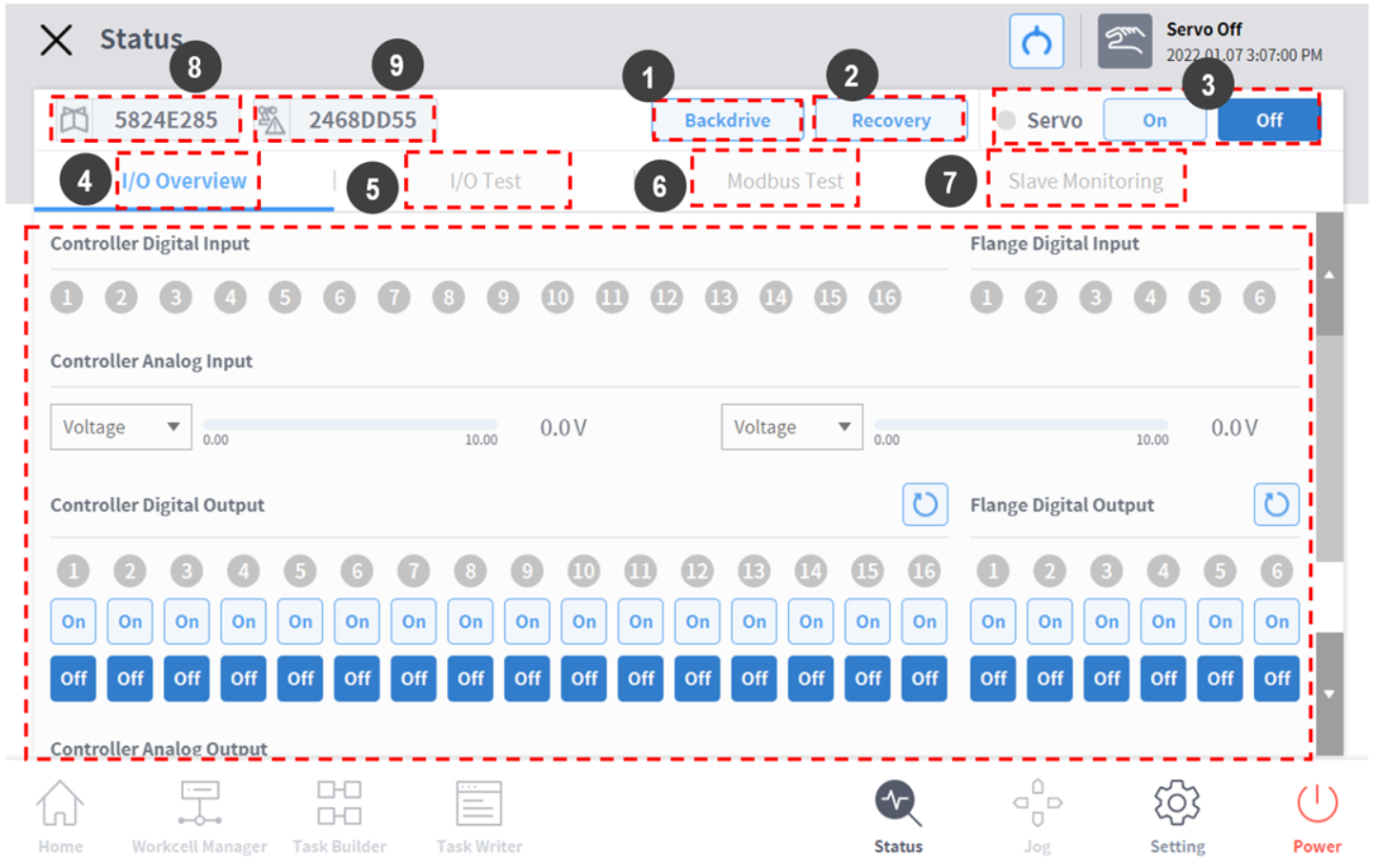
La ventana Estado le permite verificar la información de E/S de los dispositivos conectados a la caja de control y la brida, y se pueden ejecutar el modo Retroceso y la función Recuperación de seguridad.
La ventana Estado es una ventana emergente, de modo que es posible tocar el botón Estado en la pantalla Home, Task Builder o Task Writer incluso durante el modo automático para verificar la información de E/S. La prueba de salida no se puede realizar durante el modo automático.
|
N.º |
Elemento |
Descripción |
|---|---|---|
|
1 |
Backdrive |
Si el robot se detiene debido a una anomalía durante el funcionamiento, el usuario puede cortar la alimentación a cada junta y mover la junta a la posición deseada para recuperar el estado de operación normal. |
|
2 |
Safety Recovery |
Configura el ángulo y la posición del robot cuando se configura el robot en el modo de recuperación del software y en el modo de embalaje. |
|
3 |
Servo On |
Abastece la fuerza motriz que mueve cada articulación del robot. |
|
4 |
I/O |
Administra los estados de E/S digitales y analógicas de la caja de control y la brida. |
|
5 |
I/O Test |
Controla y prueba los dispositivos digitales y analógicos de E/S de la caja de control y de la brida por tarea. |
|
6 |
Modbus Test |
Prueba las señales del dispositivo de Modbus. |
|
7 |
Slave Monitoring |
Supervisa todas las funciones de esclavo proporcionadas por Industrial Ethernet Slave (PROFINET, EtherNet/IP, Modbus) |
|
8 |
Job Space Status Value |
Muestra el cifrado de todos los datos del espacio de trabajo registrados para verificar si se modificó la configuración del espacio de trabajo. |
|
9 |
Safety Setup Status Value |
Muestra el cifrado de todos los datos de seguridad registrados para verificar si se modificó la configuración del espacio de seguridad. |