Opcional Normal 20 min
Este ejemplo se crea en el Escritor de tareas. Este ejemplo se puede probar casi de la misma manera en el Generador de tareas.
Precaución
-
Antes de probar la muestra, asegúrese de leer y seguir (2.12-es_ES) Precauciones de uso. Para obtener más información, consulte (2.12-es_ES) PARTE 1. Manual de seguridad.
Nota
-
Si hay un par externo por encima del umbral al habilitar o deshabilitar el control de cumplimiento, el robot detiene el programa debido al error JTS (Joint Torque Sensor).
Threshold of JTS error (Nm)
Model
J1
J2
J3
J4
J5
J6
M1013
25
25
25
15
15
15
M0617
30
30
30
15
15
15
M0609
18
18
15
15
15
15
M1509
18
18
15
15
15
15
H2515
40
50
40
15
15
15
H2017
40
50
40
15
15
15
-
El cambio de rigidez se puede ejecutar independientemente del tamaño de par externo.
-
Durante el control de conformidad, no se pueden ejecutar movimientos conjuntos, como el comando MoveJ.
-
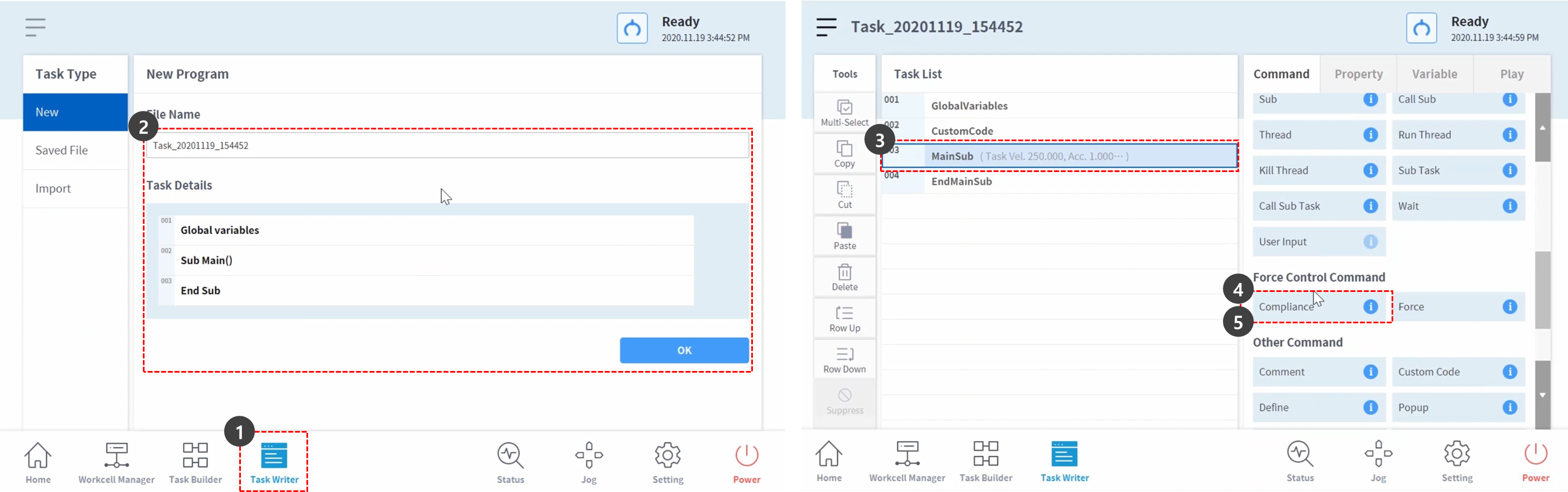
Seleccione el Escritor de tareas en el menú inferior.
-
Introduzca el nombre de la tarea y pulse el botón OK.
-
Seleccione el comando MainSub en la tercera línea de la lista de tareas. Se agrega un nuevo comando a la siguiente línea de la línea seleccionada.
-
Agregar comando de cumplimiento. Este comando está planificado para utilizarse para activar el control de conformidad.
-
Agregue otro control de cumplimiento. Este comando está planificado para ser utilizado para deshabilitar el Control de conformidad.
-
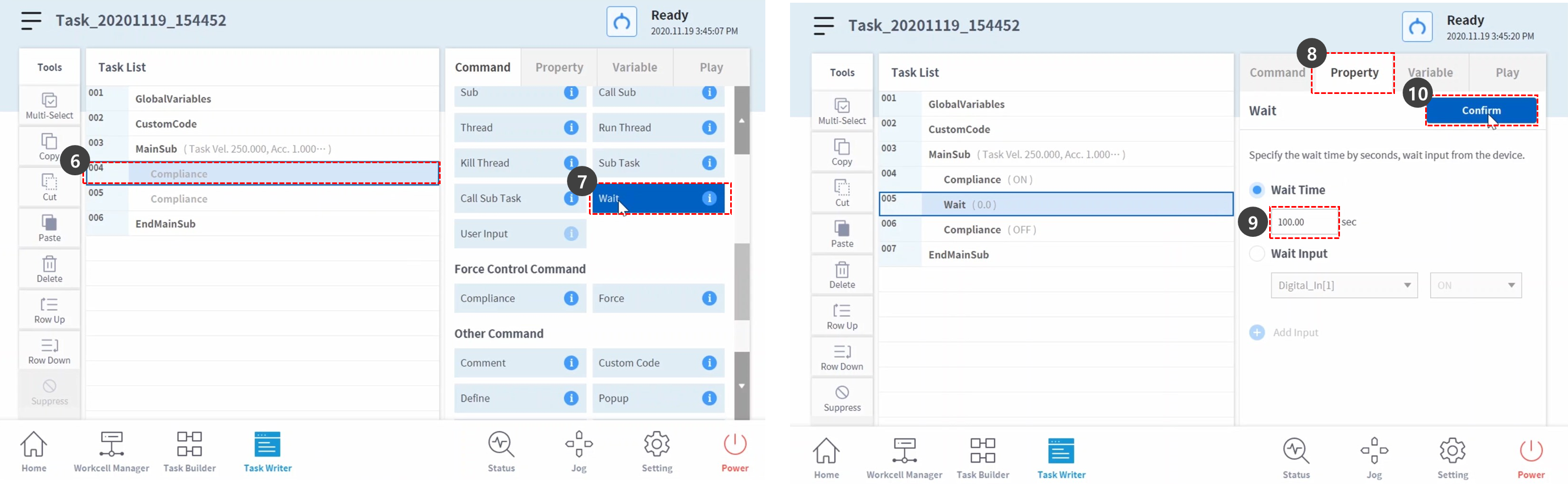
Seleccione el comando Cumplimiento en la cuarta línea. Se agrega un nuevo comando a la siguiente línea de la línea seleccionada.
-
Agregar comando de espera.
-
Seleccione la ficha Propiedad.
-
Establezca el tiempo de espera de la siguiente manera:
-
Tiempo de espera: 100 seg
-
-
Pulse el botón de confirmación.
-
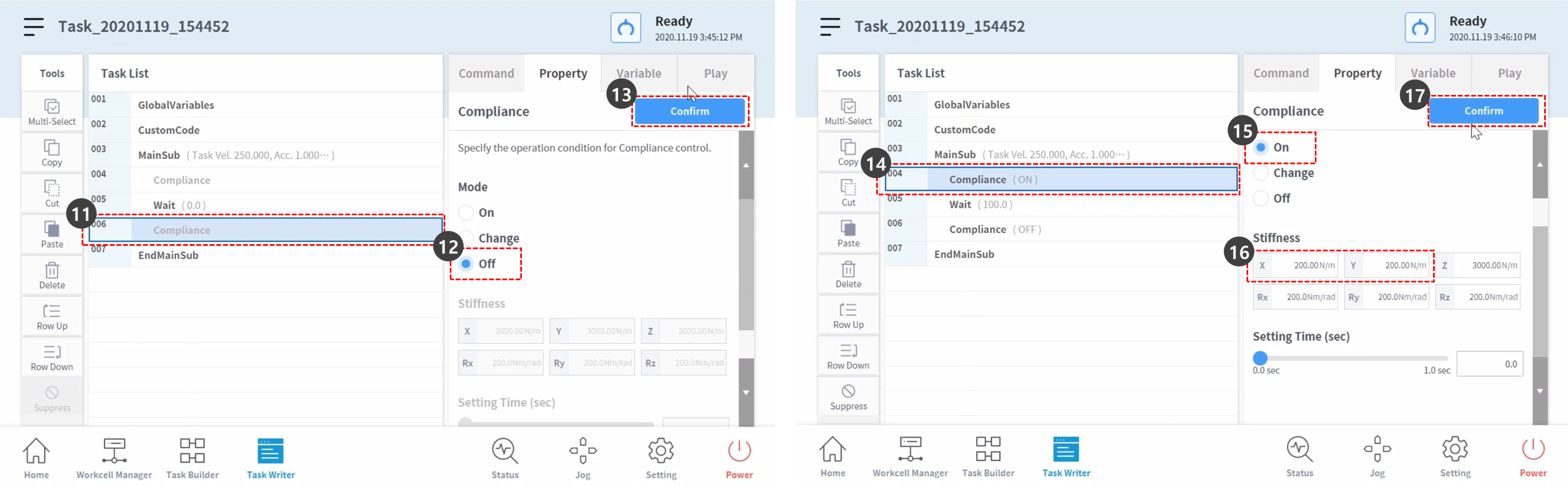
Seleccione el comando Cumplimiento en la sexta línea.
-
Establezca el modo en la propiedad como se indica a continuación: El modo desactivado desactiva el control de conformidad.
-
Modo: Apagado
-
-
Pulse el botón de confirmación.
-
Seleccione el comando Cumplimiento en la cuarta línea.
-
Establezca el modo en la propiedad como se indica a continuación: El modo activado activa el control de conformidad.
-
Modo: Encendido
-
-
Configure la rigidez como se indica a continuación: Reduzca la rigidez de las direcciones X e Y para reacciones más suaves en las direcciones X e Y.
-
X: 200 N/m
-
Y: 200 N/m
-
Z: 3000 N/m (predeterminado)
-
RX, Ry, Rz: 200 Nm/rad (predeterminado)
-
-
Pulse el botón de confirmación.
-
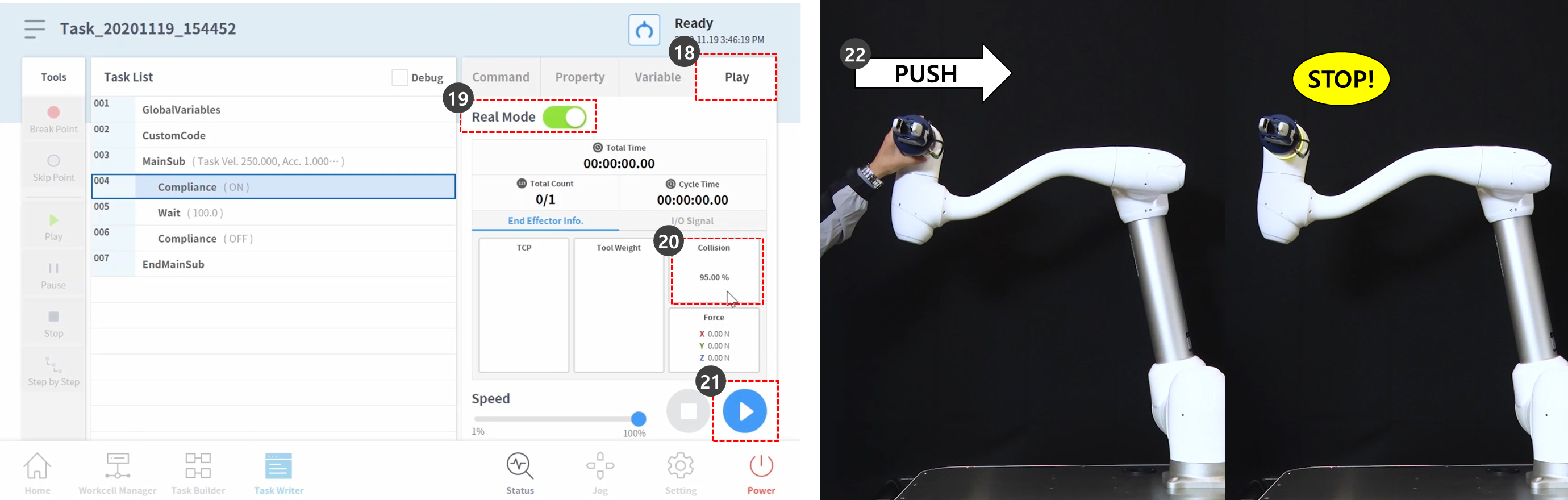
Seleccione la ficha Reproducir.
-
Active el botón de alternar Modo real.
-
Una vez que el botón de alternar se activa, el botón se ilumina en verde.
-
-
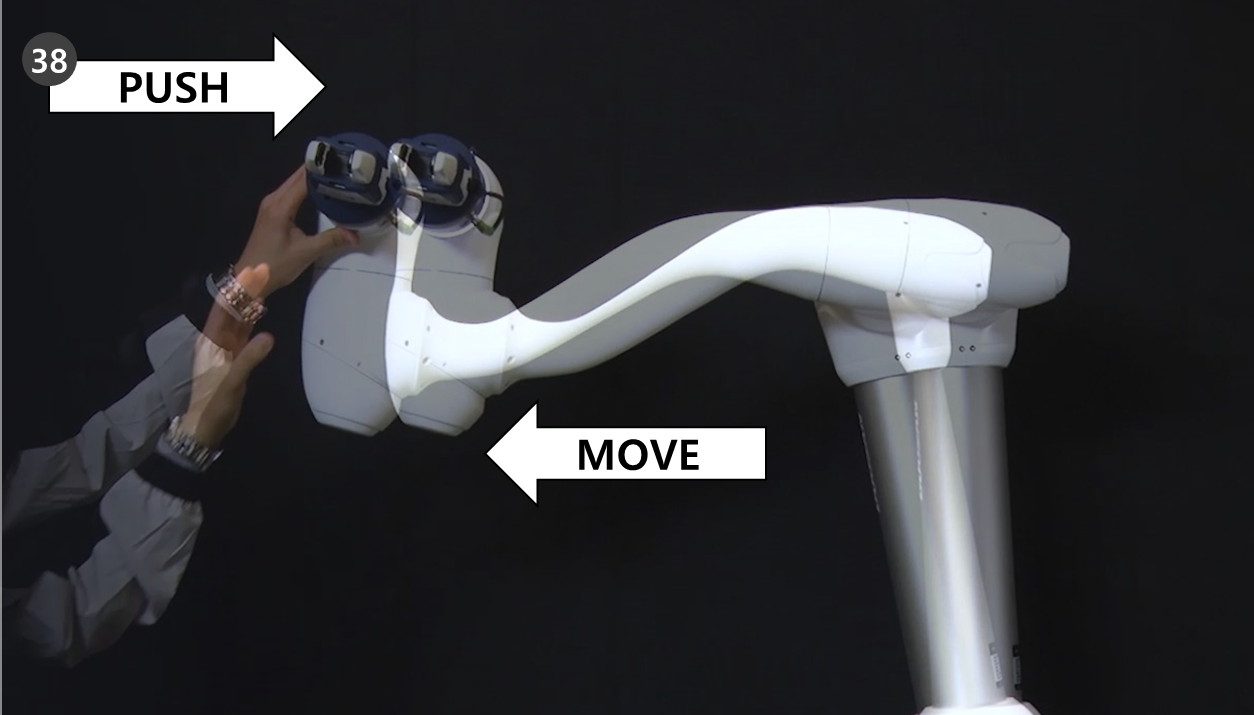
Esta muestra activará deliberadamente la parada de seguridad para explicar el motivo por el que se reduce la sensibilidad de colisión durante el control de conformidad. La sensibilidad de colisión de esta muestra es del 95%. En casos con una sensibilidad de colisión tan alta, el robot reacciona a las colisiones de forma muy sensible.
-
Al producirse una colisión, el robot se detiene mediante la parada de seguridad.
-
-
Pulse el botón Reproducir.
-
Sujete el extremo del robot y empújelo lentamente en la dirección del cuerpo del robot. El robot se detiene debido a un error de colisión. Durante la parada de seguridad debido a una colisión, el LED del robot se ilumina en amarillo.
-
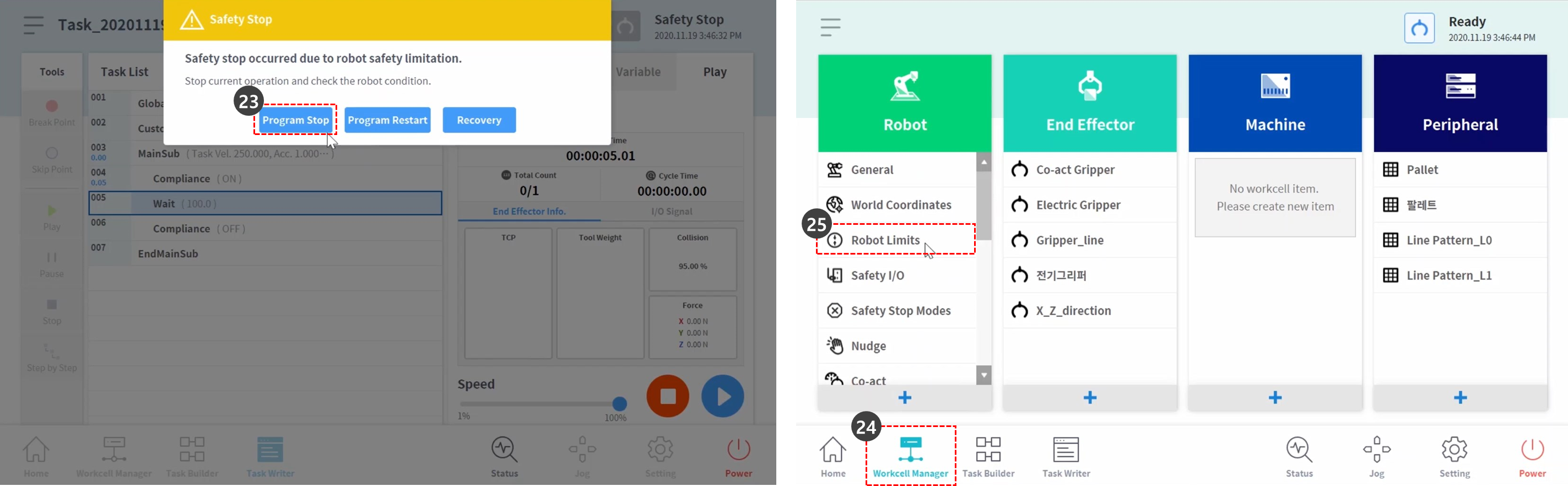
Pulse el botón Programar parada en la ventana amarilla de advertencia de parada de seguridad de la pantalla. Se detiene el programa de tareas en curso.
-
Seleccione el Administrador de células de trabajo en el menú inferior.
-
Seleccione Robot > Límites del robot.
-
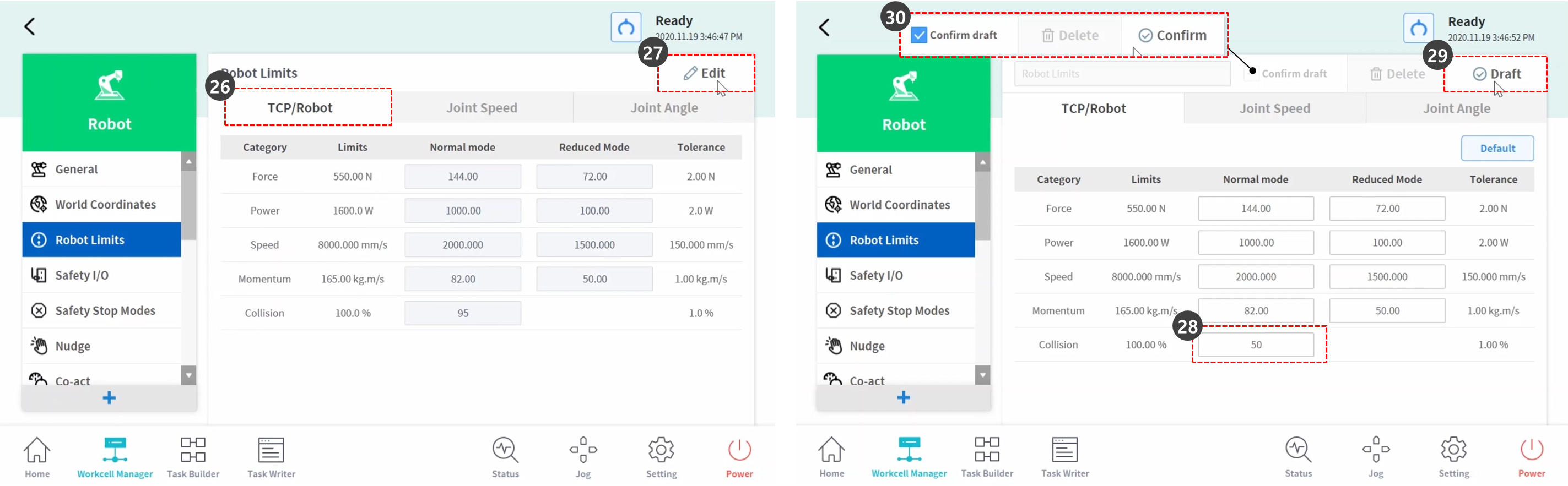
Seleccione la pestaña TCP/Robot.
-
Pulse el botón Editar.
-
Establezca la Sensibilidad de colisión como se indica a continuación:
-
Modo normal: 50 %
-
-
Pulse el botón Borrador.
-
Marque la casilla de verificación Confirmar borrador y pulse el botón Confirmar.
-
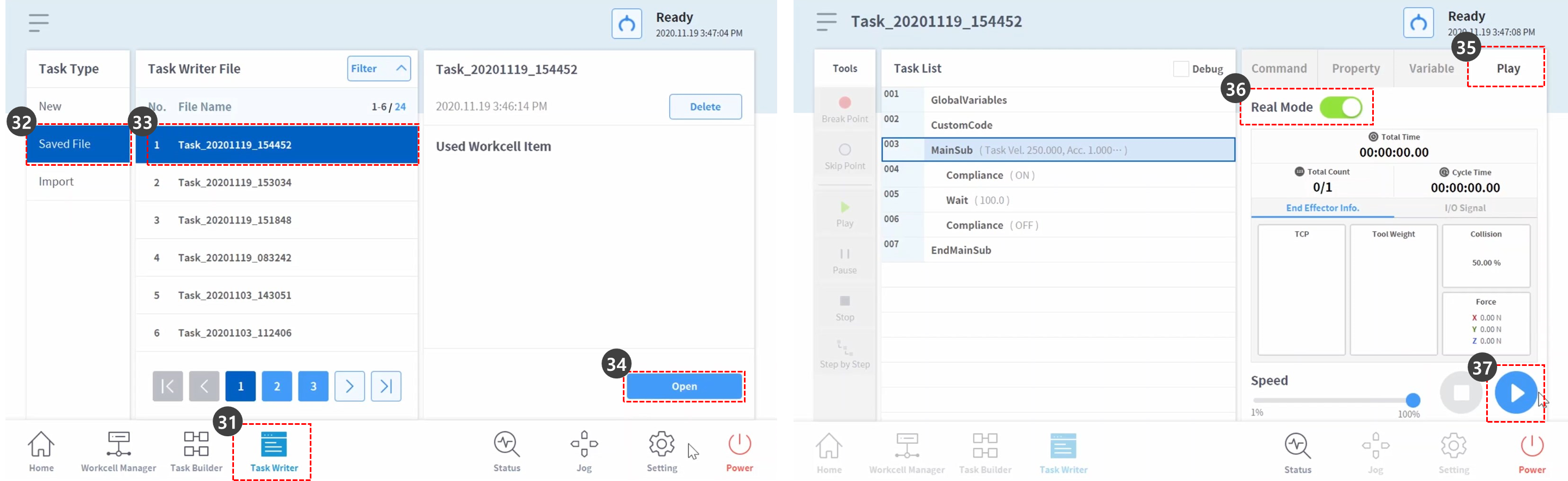
Seleccione el Escritor de tareas en el menú inferior.
-
Seleccione el archivo guardado en la pantalla de la izquierda.
-
Compruebe si el nombre del primer archivo de tarea es el nombre de la tarea en el paso 2 antes de seleccionar. La última tarea guardada se encuentra en la parte superior de la lista de archivos de Task Writer.
-
Pulse el botón Abrir.
-
Seleccione la ficha Reproducir.
-
Active el botón de alternar Modo real.
-
Pulse el botón Reproducir.
-
Sujete el extremo del robot y empújelo lentamente en la dirección del cuerpo del robot. El robot se mueve debido a la fuerza de empuje y vuelve a su posición original.