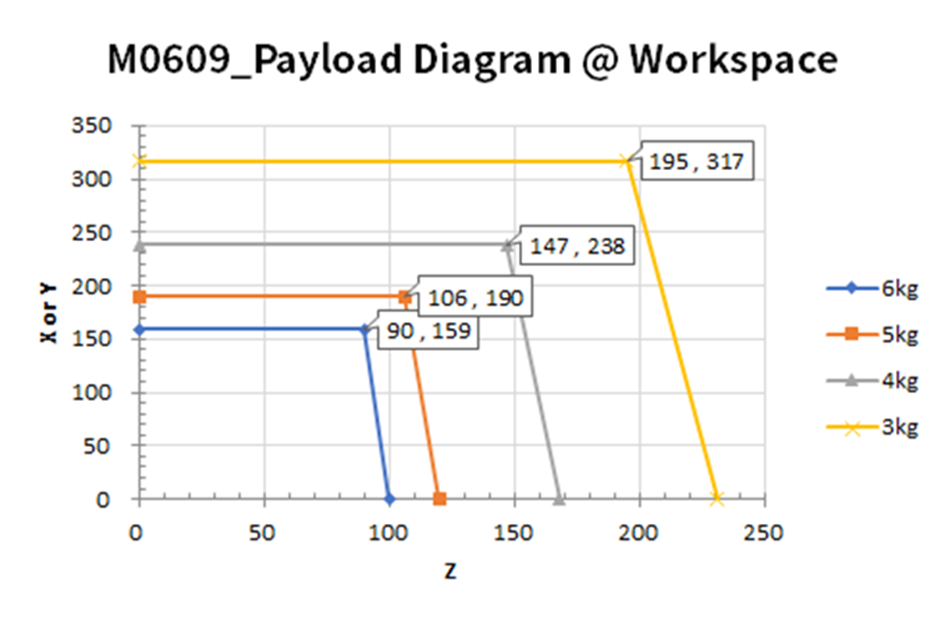
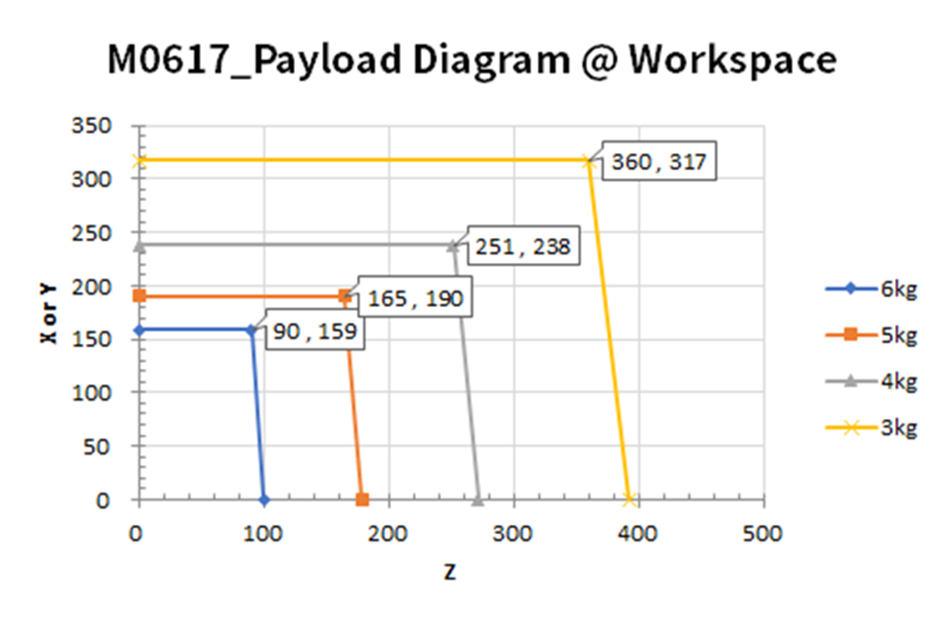
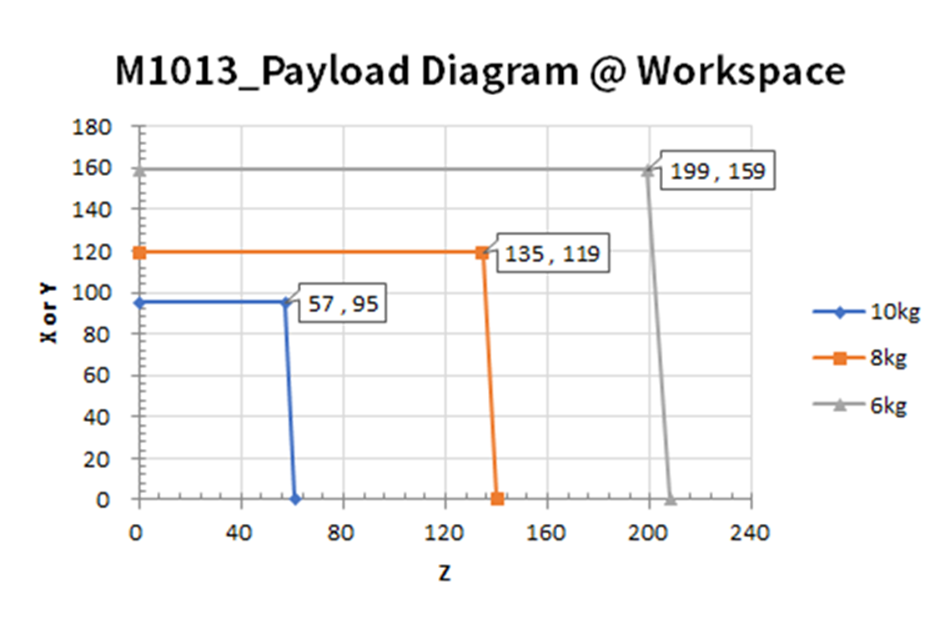
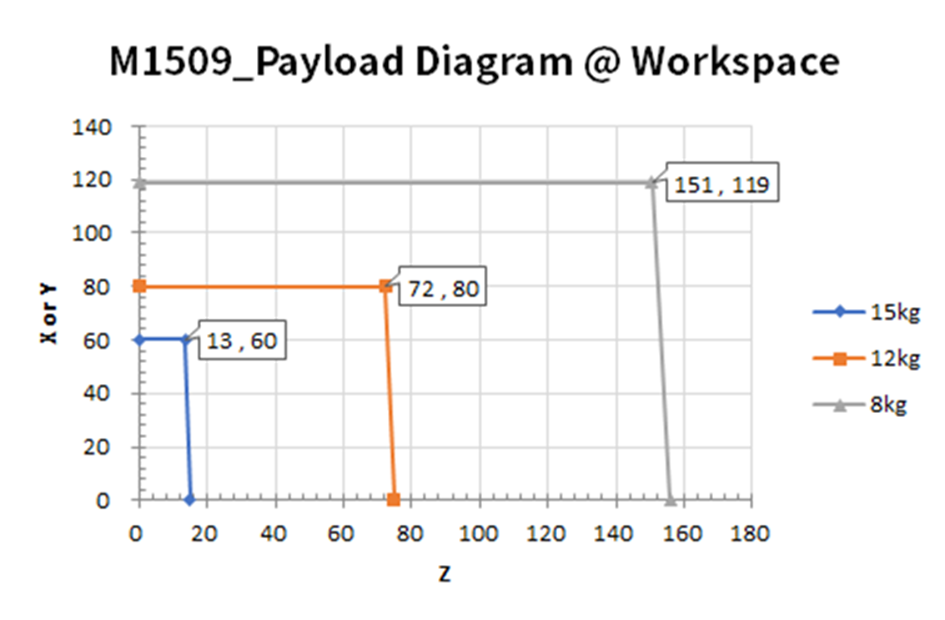
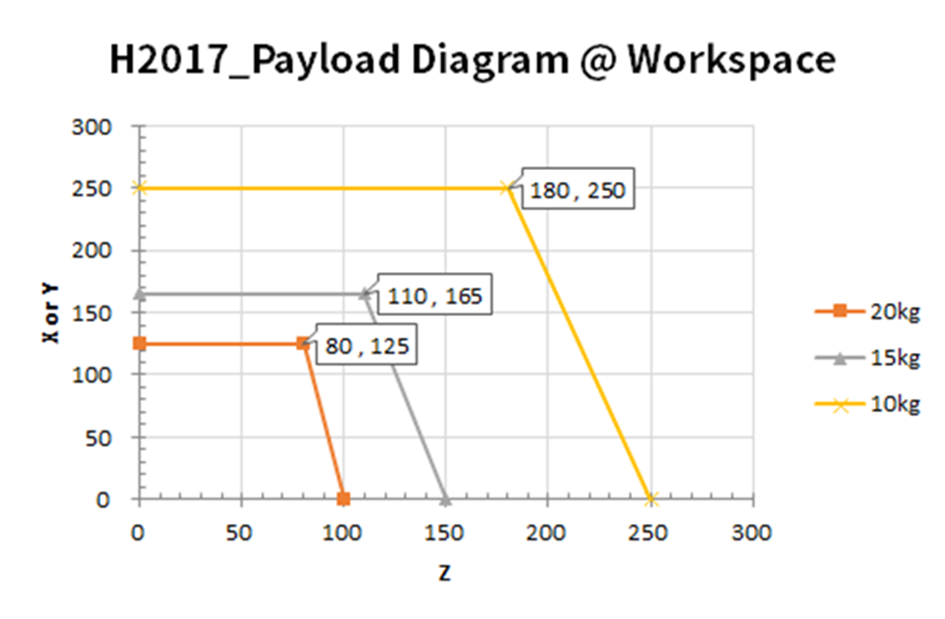
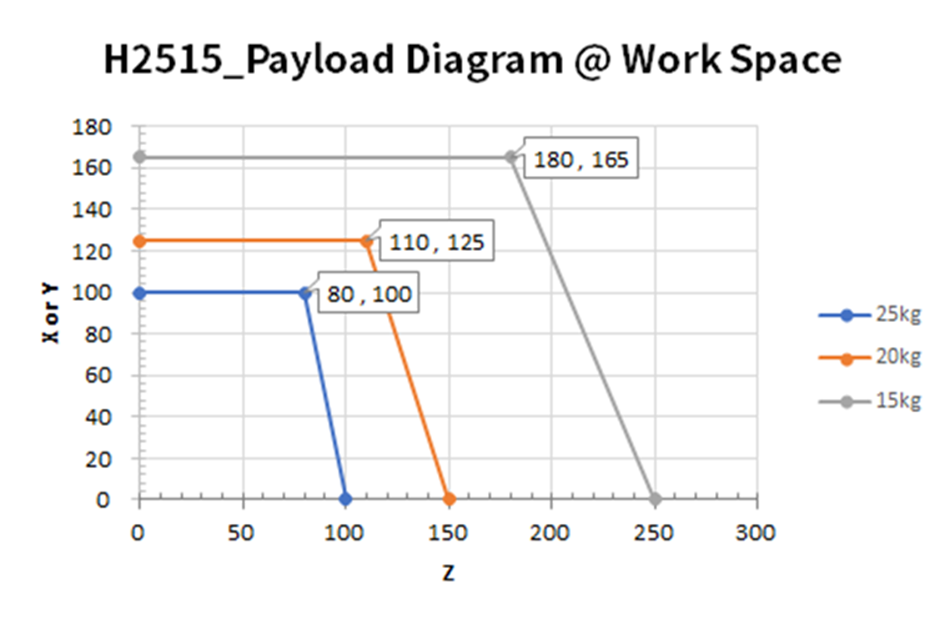
La carga útil máxima del robot dentro de su espacio operativo cambia según la distancia desde el centro de gravedad. La carga útil por cada distancia es la siguiente:
Este diagrama de carga asume un volumen de carga de herramienta pequeño. Las herramientas con un volumen mayor tendrán más limitaciones en la carga útil por encima del centro de gravedad de la herramienta en comparación con una herramienta con el mismo peso pero de menor volumen y, en tales casos, puede producirse una vibración.
M0609
M0617
M1013
M1509
H2017
H2515
Inercia y momento permitido
La inercia y el momento permitido para el robot J4-J6 son los siguientes:
|
Nombre del modelo |
J4 |
J5 |
J6 |
|||
|---|---|---|---|---|---|---|
|
Momento permitido |
Inercia |
Momento permitido |
Inercia |
Momento permitido |
Inercia |
|
|
M0609 |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
|
M0617 |
||||||
|
M1013 |
||||||
|
M1509 |
||||||
|
H2017 |
145 Nm
|
8.0 kg㎡
|
81Nm |
4.5 kg㎡
|
36 Nm
|
2.0 kg㎡ |
|
H2515 |
||||||