Los comandos de habilidades están basados en algunos patrones de funcionamiento.
Para que un robot comience a funcionar, se deben configurar el peso y el centro de herramienta (TCP) de la herramienta equipada en el robot, y el patrón de funcionamiento básico de los comandos de habilidades debe tener una postura de aproximación y una postura de retracción que sean perpendiculares a la postura de referencia.
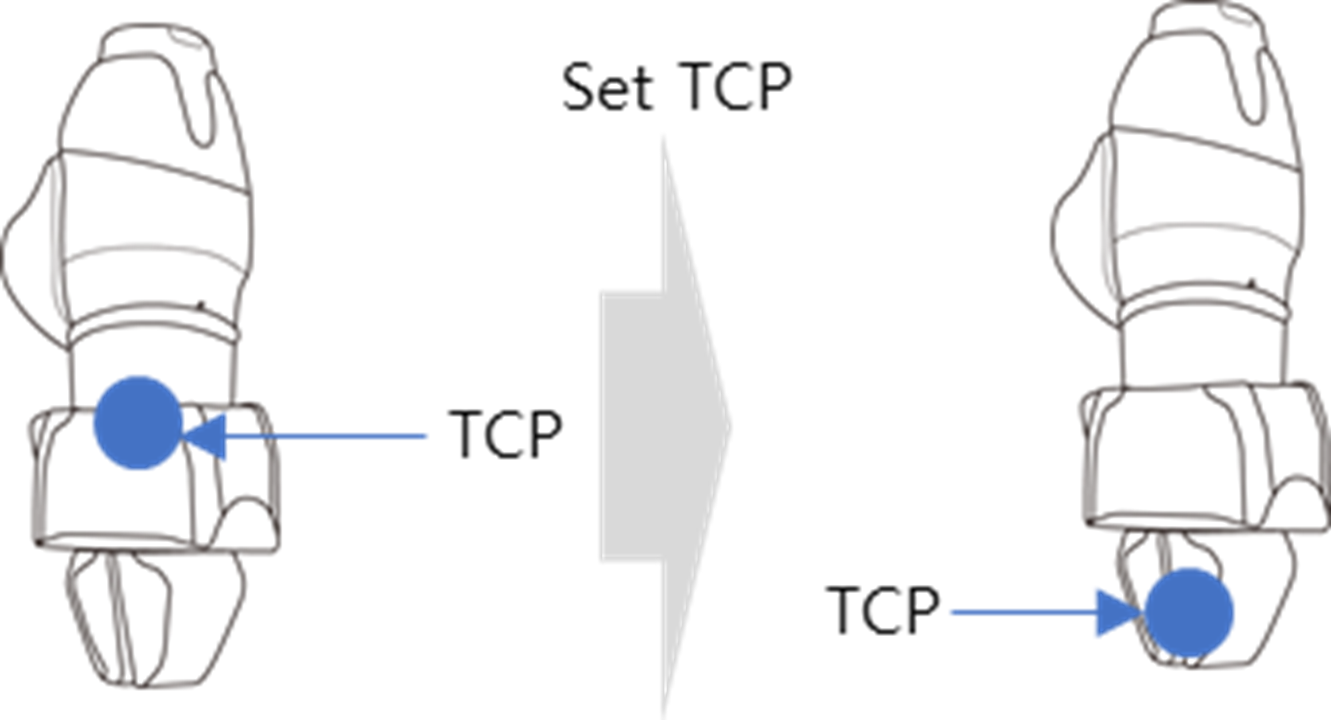
Configuración del TCP: El uso de un comando de habilidad de efector final modifica automáticamente la configuración del desplazamiento del TCP. La etapa de ejecución del comando de habilidad de efector final incluye una configuración del desplazamiento adecuada para el TCP del efector final. Si cambia el desplazamiento del TCP, la función Movimiento de fusión, que conecta fácilmente el comando de movimiento, no se puede utilizar.
. 
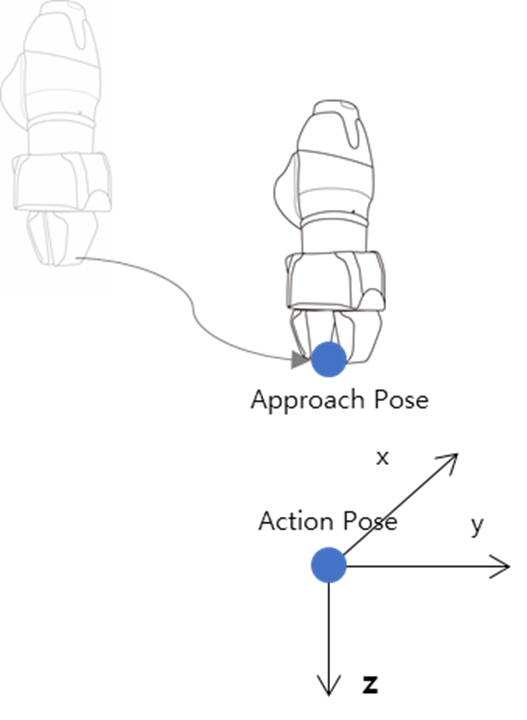
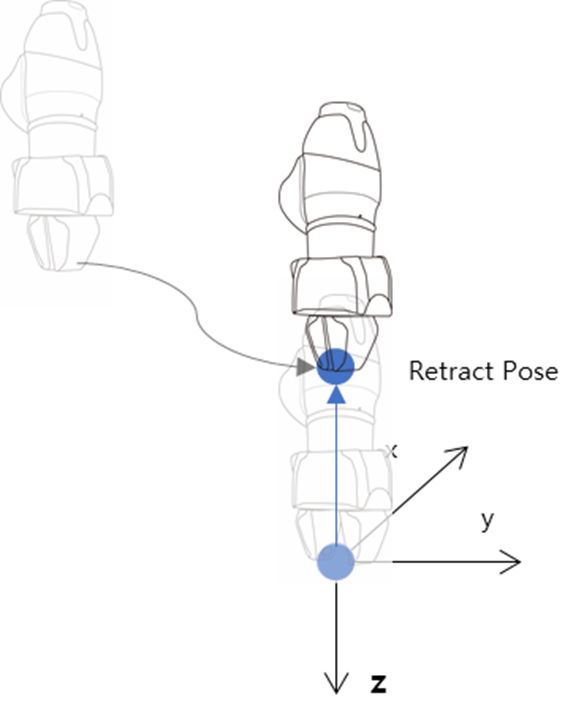
Mover a postura de aproximación: Es un punto disponible para moverse a la postura de aproximación. Se configura en la dirección de Z desde la postura de aproximación, y también se puede seleccionar una dirección diferente. La distancia de aproximación introducida se calcula automáticamente para la Postura de acción y se mueve al punto correspondiente.
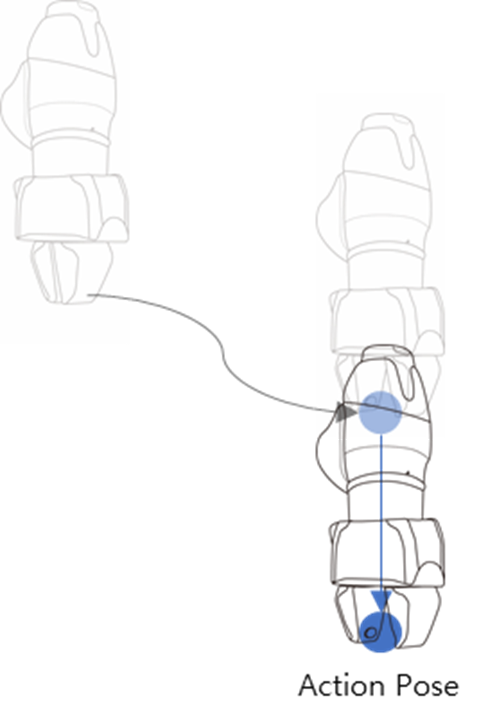
Mover a postura de referencia: Es el punto en la pieza de trabajo donde el efector final realiza el trabajo Para configurar coordenadas detalladas distintas de la velocidad y la aceleración para la 
Mover a postura de retracción: Es el punto para recoger la pieza de trabajo y moverla de manera segura hacia otro punto. Es la dirección de Z desde la postura de aproximación, y también se puede seleccionar una dirección diferente. La distancia de retracción introducida se calcula automáticamente para la Postura de acción y se mueve al punto correspondiente.
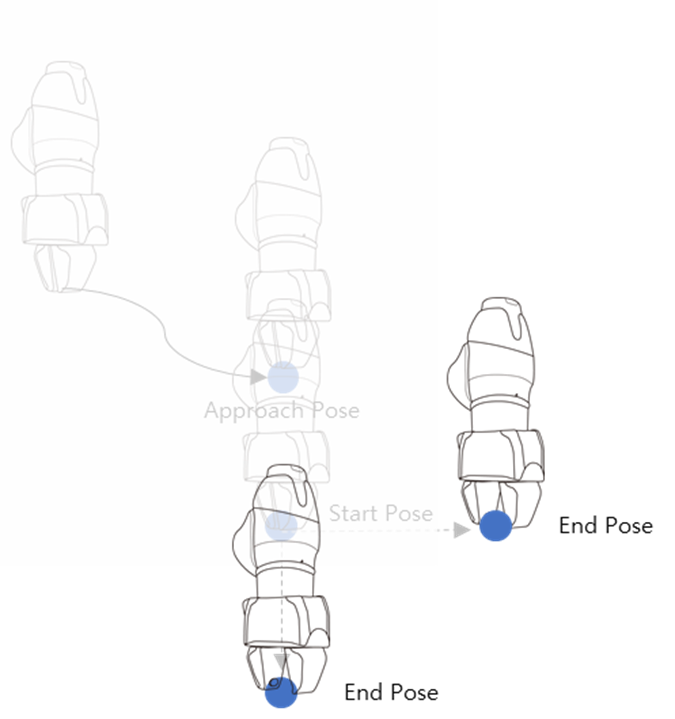
Mover a postura inicial: Si el objetivo de ejecución del Efector final no finaliza con un solo movimiento, puede haber un punto intermedio y un punto final, y la Postura inicial de acción es el punto donde comienza el trabajo. (p. ej., habilidad Door_OpenClose - Postura inicial)
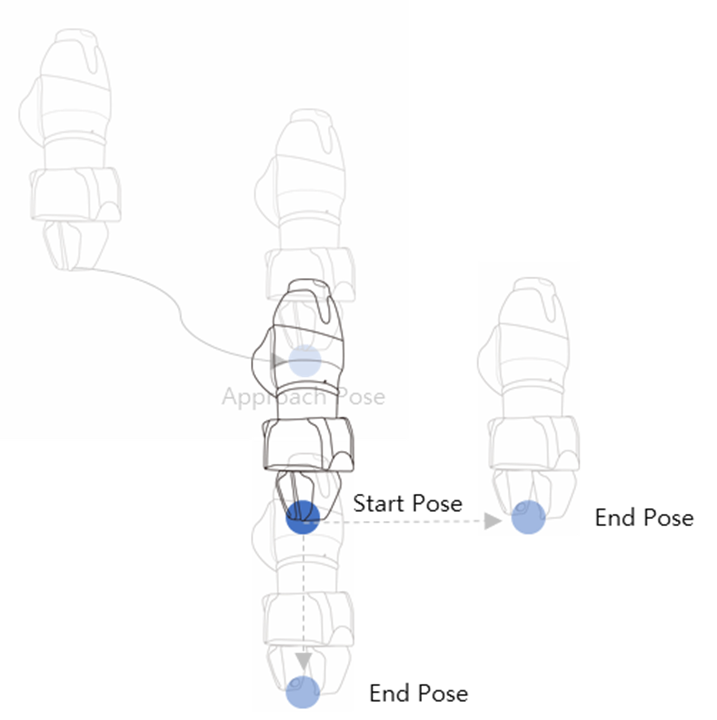
Mover a postura final: Si el objetivo de ejecución del Efector final no finaliza con un solo movimiento, puede haber un punto intermedio y un punto final, y la Postura final de acción es el punto donde finaliza el trabajo. (p. ej., habilidad Door_OpenClose - Postura final)