Obligatorio Normal 15 min
El usuario puede seleccionar un método de movimiento manual en la ficha Jog. Para obtener más información sobre el desplazamiento/desplazamiento/alineación, consulte (2.11.0.1_temp-es_ES) Función de avance.
-
Jog: Mueve la junta del robot o TCP al eje de la junta o al eje de coordenadas seleccionado por el usuario
-
Mover: Mueve la junta del robot o TCP al punto de destino que el usuario ha introducido
-
Alinear: Mueve el extremo del robot al plano perpendicular al plano seleccionado por el usuario y el eje de coordenadas paralelo al extremo del robot
El movimiento del robot consta de dos tipos.
-
Movimiento de la junta: Mueve cada articulación linealmente con un movimiento giratorio
-
Movimiento de tarea: Mueve el extremo linealmente al punto de destino
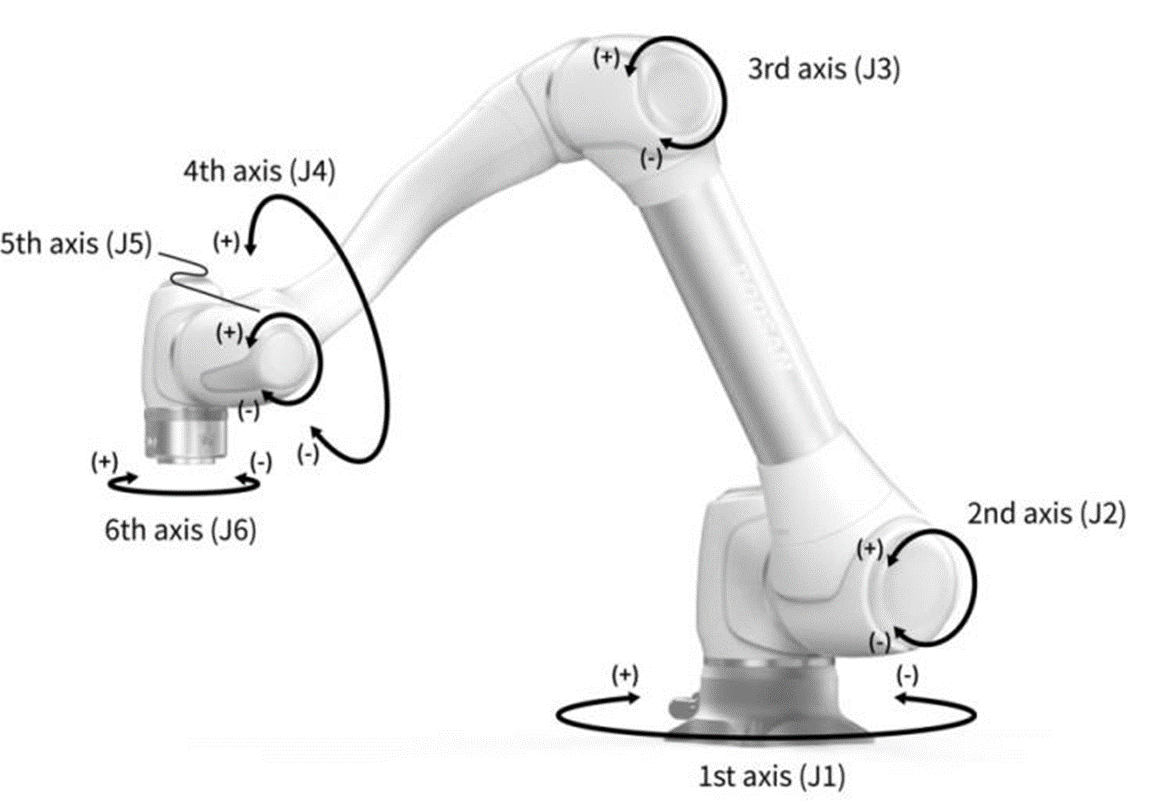
A continuación se muestra el método para mover el robot mediante el movimiento de la junta desde la pantalla de quiebre de cota:
-
Seleccione la pestaña Junta.
-
Seleccione el eje que desea mover. Por ejemplo, puede seleccionar J1.
-
Pulse el botón +/- para mover el robot. El robot se mueve mientras se pulsa el botón +/- y la ubicación actual se muestra en la pantalla en tiempo real.
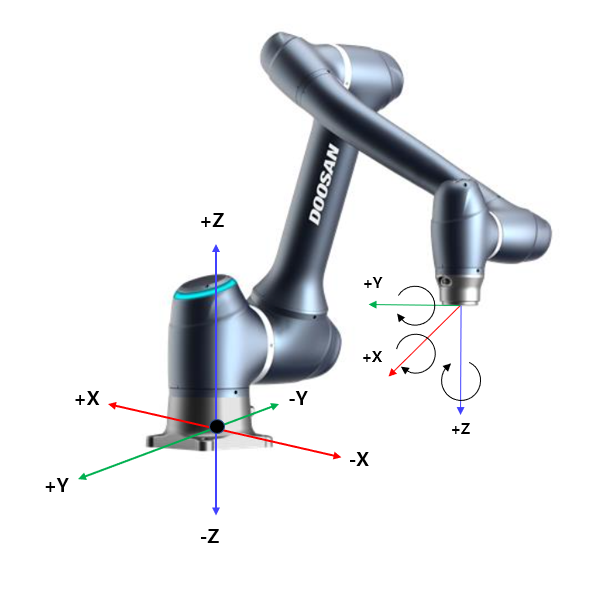
A continuación se muestra el método para mover el robot mediante el movimiento de la tarea en la pantalla de quiebre de cota:
-
Seleccione las coordenadas base. El robot se puede mover de acuerdo con las coordenadas DE LA BASE o LAS coordenadas DE LA HERRAMIENTA.
-
Seleccione la dirección que desea mover. Por ejemplo, se puede seleccionar el eje X.
-
Pulse el botón +/- para mover el robot. El robot se mueve mientras se pulsa el botón +/- y la ubicación actual se muestra en la pantalla en tiempo real.
Para obtener más información sobre el movimiento de quiebre de cota, el movimiento y la alineación, consulte Pantalla Avance, Pantalla de movimiento y Alinear pantalla respectivamente.
-
Si el interruptor basculante del modo actual en la parte superior izquierda de la pantalla de Jog está desactivado, el robot se mueve sólo en la pantalla virtual a la izquierda de la pantalla de Jog. El robot real se mueve si el interruptor basculante de modo real está activado.