Retroceso permite controlar la articulación del robot únicamente con el freno y sin accionar el motor. Esta función se emplea cuando el robot no puede volver a la normalidad con el modo de recuperación de seguridad o el guiado manual. Con el modo Retroceso, el usuario puede activar o desactivar el freno de cada articulación.
El proceso de configuración del modo de Retroceso se realiza según se detalla a continuación:
-
Toque el botón Estado en el menú principal y toque el botón Retroceso.
-
Si no se activa el botón Retroceso, presione y suelte el botón de parada de emergencia o pulse el botón Servo apagado para activarlo.
-

-
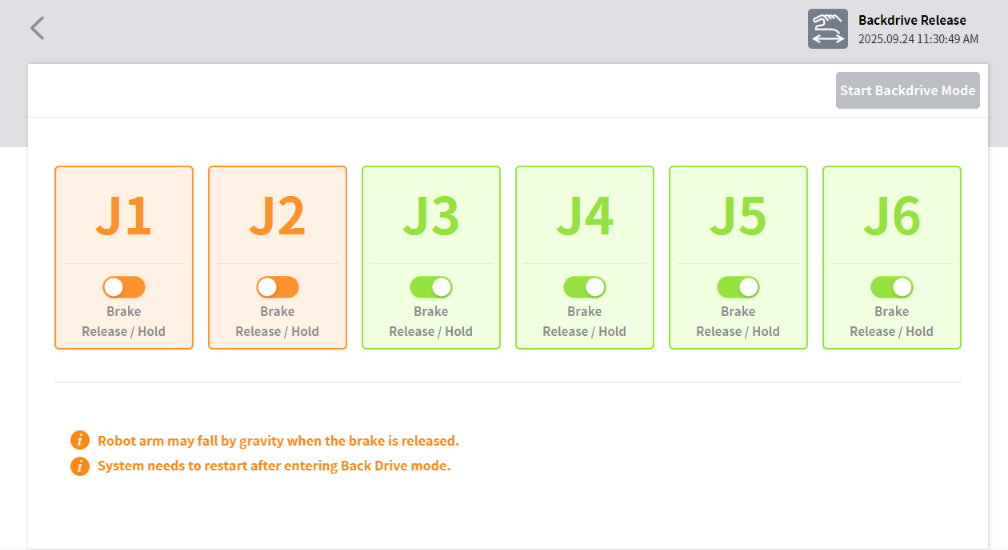
Toque el botón Iniciar modo de retroceso en la pantalla Retroceso.
-
Los botones Liberar y Mantener para liberar los frenos de cada articulación están habilitados.
-
Liberar: Naranja
-
Mantener: Verde
-
-
-
Desactive (suelte) el freno de la articulación que desea mover y mueva el robot aplicando fuerza.
-
Debido a la relación de desaceleración del desacelerador dentro de la articulación, la velocidad de caída de la articulación debido al peso del manipulador no es alta y la velocidad de movimiento al aplicar fuerza tampoco es alta.
-
Si el desacelerador tiene alguna falla o si las articulaciones se mueven a una velocidad mayor durante el movimiento de retroceso, los frenos de todas las articulaciones se aplican automáticamente para garantizar la seguridad.
-
-
Active el freno (sostenga) cuando el cambio de posición haya finalizado.
-
Toque Encendido en el menú principal para apagar el sistema operativo, mantenga presionado el botón de encendido arriba del del teach pendant para apagar el sistema y vuelva a pulsarlo para encender el sistema.
-
El retroceso se libera y se puede retomar el trabajo con normalidad.
-
Nota
-
Mueva cada articulación de vuelta al rango de trabajo normal de manera individual en orden secuencial.
-
Si se ejecuta el modo de retroceso, se debe reiniciar el sistema para volver a retomar el trabajo normal.
-
Tenga precaución ya que puede producirse una caída temporal en función de la ubicación del eje en el modo de retroceso.