Obligatorio Fácil 3 min
-
Antes de la programación, el ajuste de seguridad, la posición de instalación y el ajuste de la herramienta se deben completar con Workcell Manager. Para obtener más información, consulte Paso 3. Funcionamiento y ajuste del robot.
-
El uso excesivo de comandos TP_LOG o SET dentro de bucles puede provocar una sobrecarga de la CPU.
Doosan Robotics ofrece dos tipos de entornos de programación de tareas.
-
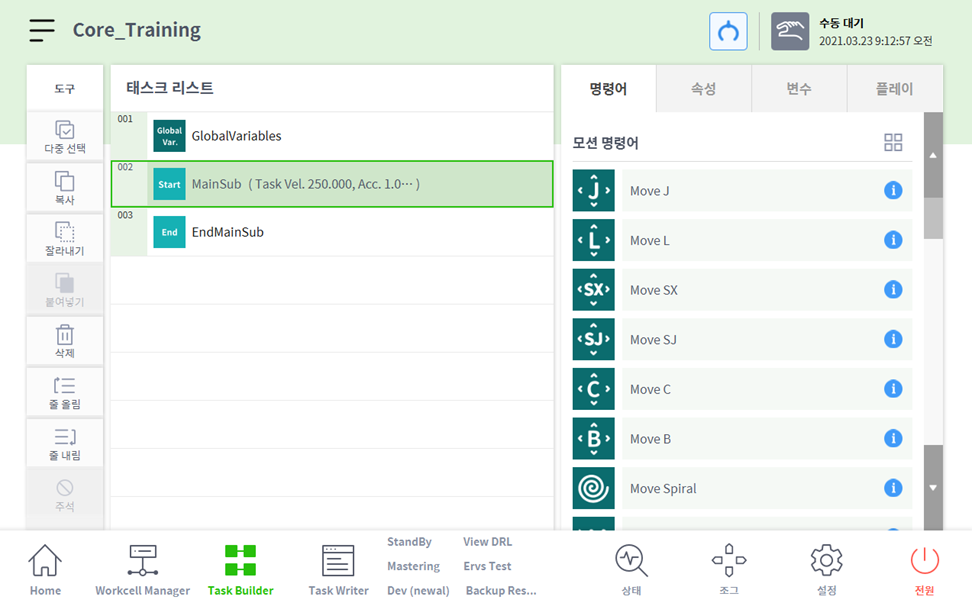
Creador de tareas: Es un entorno de codificación basado en bloques de iconos que utiliza iconos de comando y habilidad. Las habilidades se admiten en función de los elementos de la célula de trabajo registrados en Workcell Manager.
-
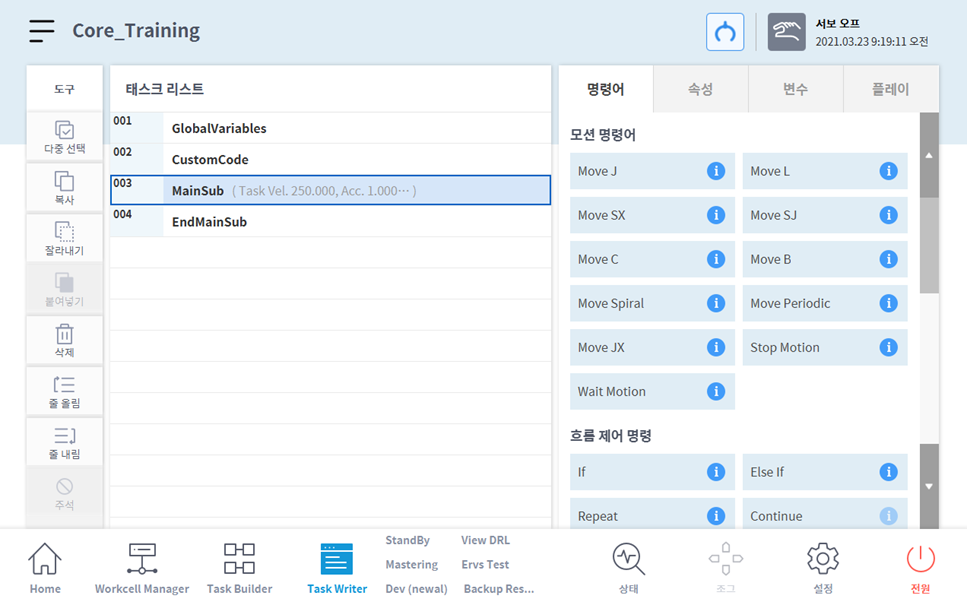
Escritor de tareas: Se trata de un entorno de codificación basado en bloques que utiliza programación basada en secuencias de comandos para facilitar la entrada a la unidad de programación
La diferencia entre los dos entornos de programación es la siguiente: En general, los usuarios noveles o usuarios que desean utilizar habilidades utilizan el Generador de tareas. Los usuarios intermedios que no deseen utilizar las habilidades utilizan el escritor de tareas para una programación rápida.
|
|
Clasificación |
Generador de tareas |
Escritor de tareas |
|---|---|---|---|
|
1 |
Temas |
Usuarios noveles o usuarios que necesitan usar habilidades |
Usuarios intermedios |
|
2 |
Codificación basada en bloques |
O |
O |
|
3 |
Uso de iconos de comando |
O |
X |
|
4 |
Soporte de habilidades |
O |
X |
|
5 |
Pantalla |
|
|
¿Qué es la habilidad de los robots robóticos Doosan?
-
Se trata de un comando que configura la interfaz para un uso sencillo mediante la combinación de varios comandos necesarios en un proceso con una única configuración.
-
Sólo se puede utilizar en el Generador de tareas y cada habilidad se muestra como un solo bloque. Por ejemplo, los bloques de iconos de Task Builder para Pick Skilly Place Skil son los siguientes:
