Para mover el robot basándose en coordenadas base, siga estas indicaciones:
-
Seleccione la pestaña Mover y luego la pestaña Tarea.
-
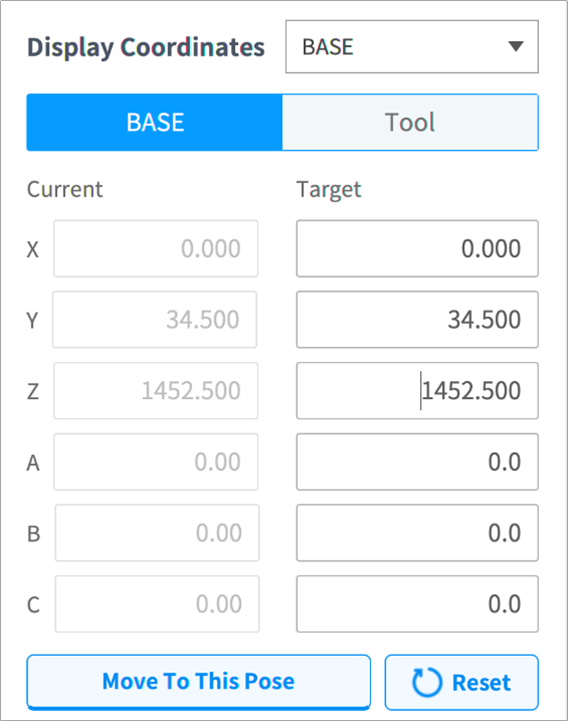
Seleccione Base como coordenadas de visualización y seleccione la pestaña Base.
-
Configure la postura que va a mover con referencia a la base.
-
Mantenga pulsado el botón Mover a postura correspondiente para ir a la coordenada establecida.