Nombres y funciones
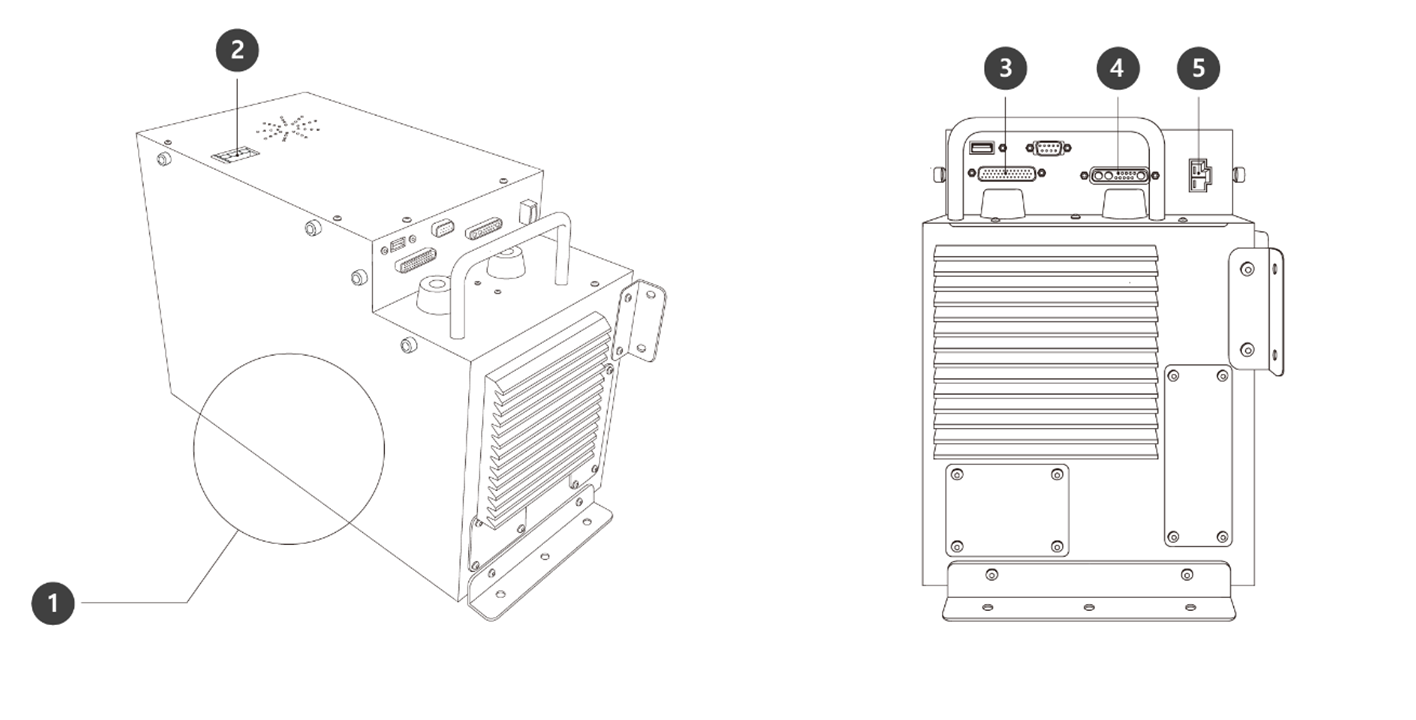
Controlador de CC (CS-02)
|
N.º |
Elemento |
Descripción |
|
1 |
I/O connection terminal (internal) |
Se usa para conectar la controlador o los periféricos. |
|
2 |
Power switch |
Se usa para encender/apagar la alimentación principal de la controlador . |
|
3 |
Teach pendant cable connection terminal |
Se usa para conectar el cable de teach pendant con la controlador. |
|
4 |
Manipulator cable connection terminal |
Se usa para conectar el cable del robot a la controlador . |
|
5 |
Power connection terminal |
Se usa para conectar el suministro de energía de la controlador . |
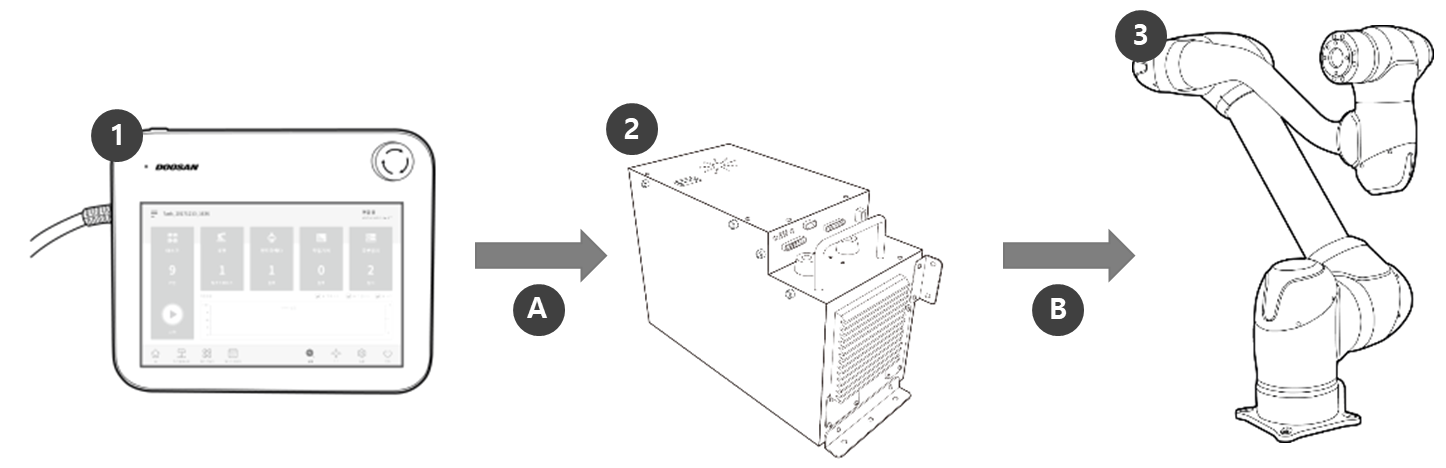
Configuración del sistema
|
N.º |
Nombre |
Descripción |
|---|---|---|
|
1 |
Teach pendant |
Es un dispositivo que administra el sistema general y es capaz de enseñarle al robot posturas específicas y configurar al manipulator y las configuraciones relacionadas de la controlador. |
|
2 |
Controlador |
Controla el movimiento del robot de acuerdo con la postura o movimiento establecido en el teach pendant. Cuenta con diferentes puertos de E/S que posibilitan la conexión y el uso de varios equipos y dispositivos. |
|
3 |
Manipulador |
Es un robot industrial colaborativo que puede realizar tareas de transporte o montaje con varias herramientas. |
|
A |
Comando/seguimiento |
|
|
B |
Alimentación/red |
|
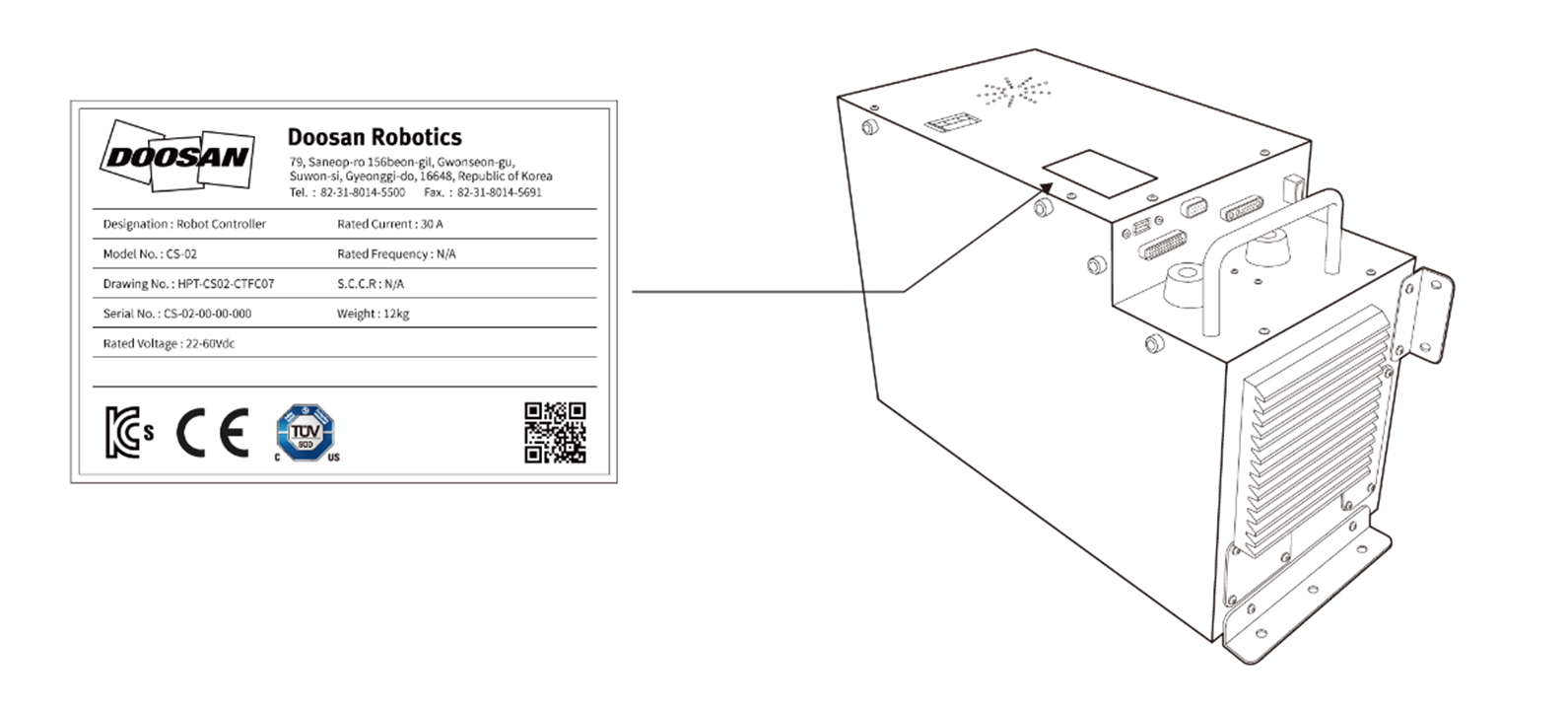
Placa de identificación y etiqueta