Questa è una funzione utile se il pezzo è allineato con il TCP in una direzione assiale per l'apprendimento del pezzo. Per eseguire l'apprendimento dopo aver bloccato la posizione, utilizzare il piano o la linea correlati alla funzione di apprendimento tramite i pulsanti del pannello di comando (cockpit).
Per allineare il TCP del robot in base al target, procedere come indicato:
-
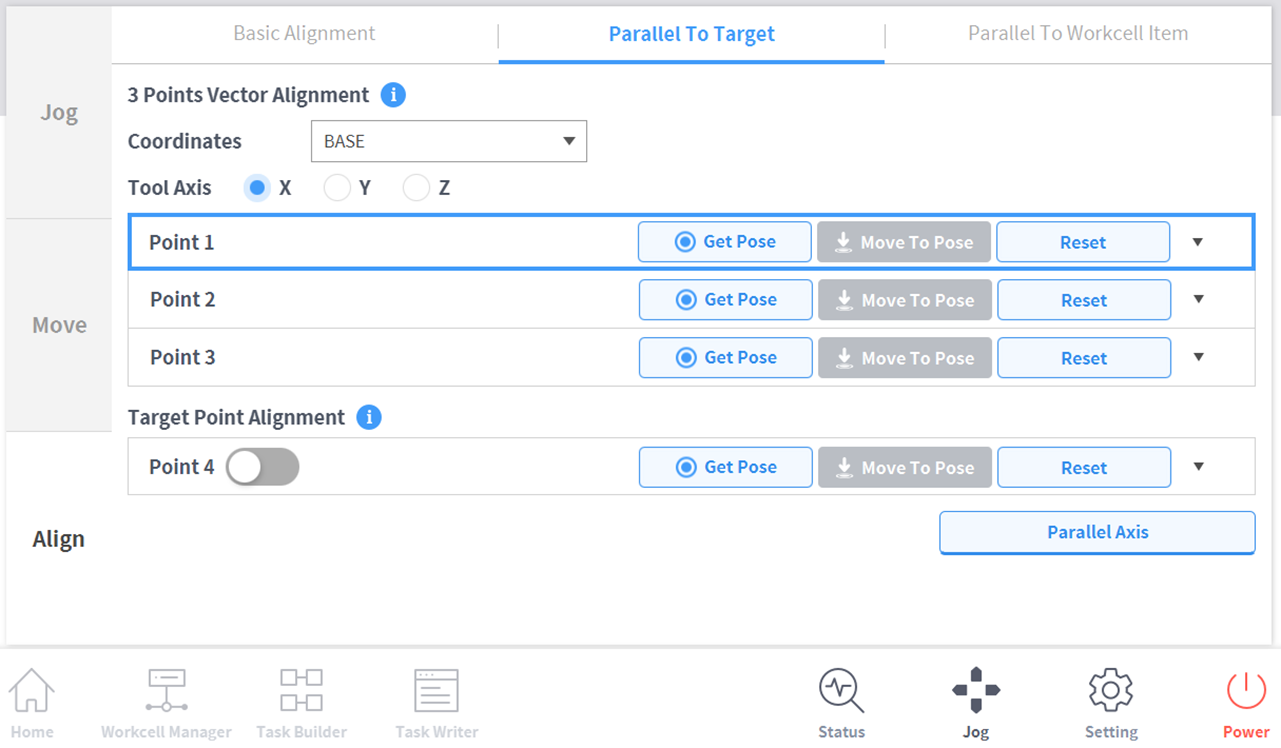
Selezionare la scheda Align e quindi Parallel To Target.
-
Selezionare le coordinate di riferimento per l'allineamento.

-
Selezionare l'asse utensile da allineare.

-
Spostare il robot nella posizione desiderata e toccare il pulsante Point 1.
-
Toccare il pulsante Save Pose (Salva posizione) del Point 1 (Punto 2).Point 2 e Point 3 vengono impostati in modo analogo. Al termine dell'impostazione, si avrà un'area vettoriale virtuale basata sui tre punti.
-
(Facoltativo) Per impostare contemporaneamente la direzione e la posizione del TCP, premere il pulsante "toggle" di commutazione del Point 4 (Punto 4), spostare il robot nella posizione desiderata e toccare il pulsante "Save Pose" (Salva posizione).
-
Toccare e tenere premuto il pulsante Align Axis (Allinea asse) per allineare l'asse.Sistemare la testa a 6 assi 150 mm sopra il target nella direzione dell'asse Z.