Quando si tenta di attivare il servomeccanismo dopo l'arresto del robot a causa di limiti di spazio e violazioni di zona, il servoazionamento viene impostato con i seguenti messaggi di allarme visualizzati.
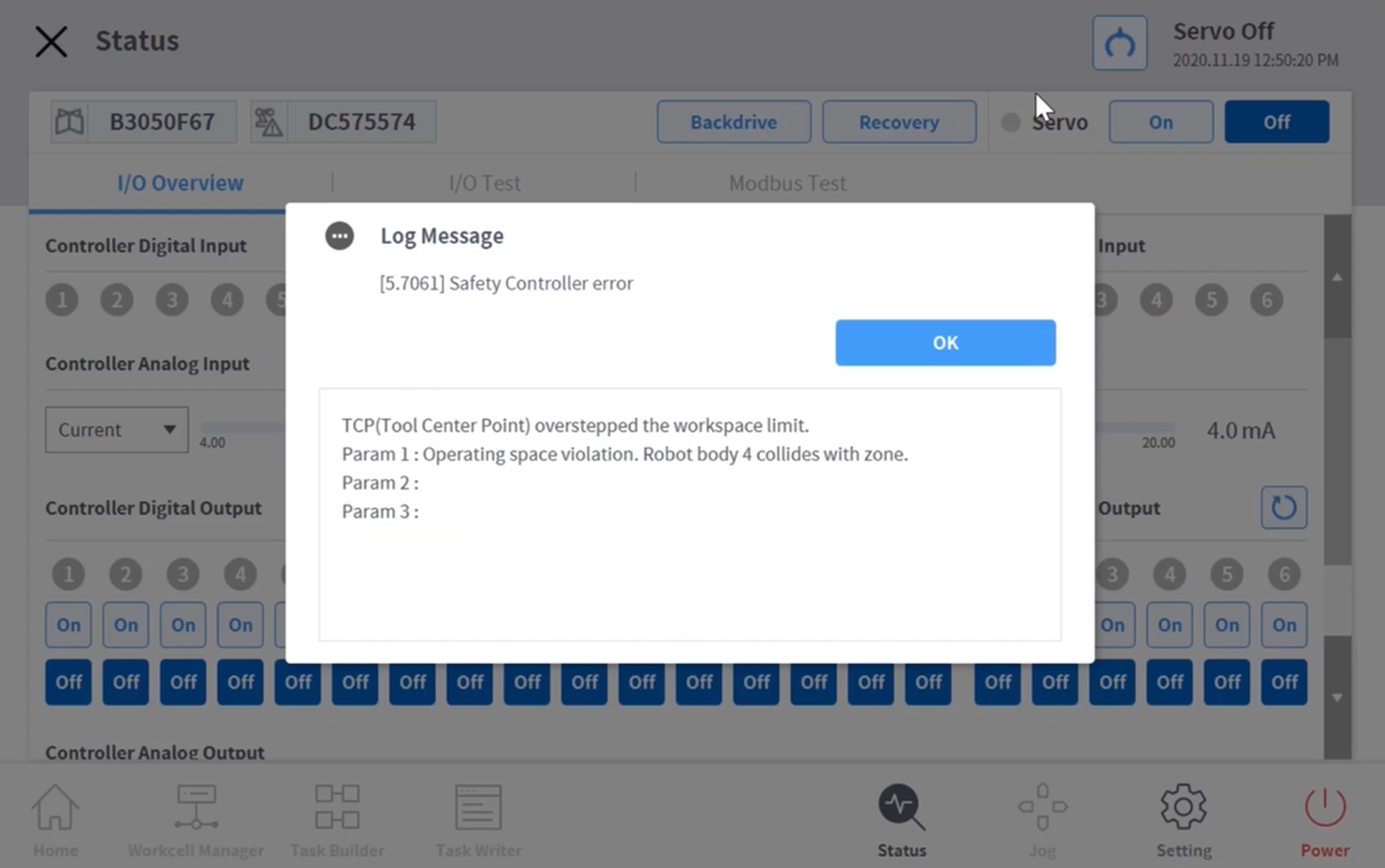
Se il robot si è arrestato a causa di un limite di spazio e di violazioni di zona, utilizzare la funzione Stato > recupero di sicurezza > recupero softwareper spostare il robot in un'area sicura. Nell'esempio seguente viene illustrato come spostare il robot in un'area sicura utilizzando la funzione di ripristino del software.
-
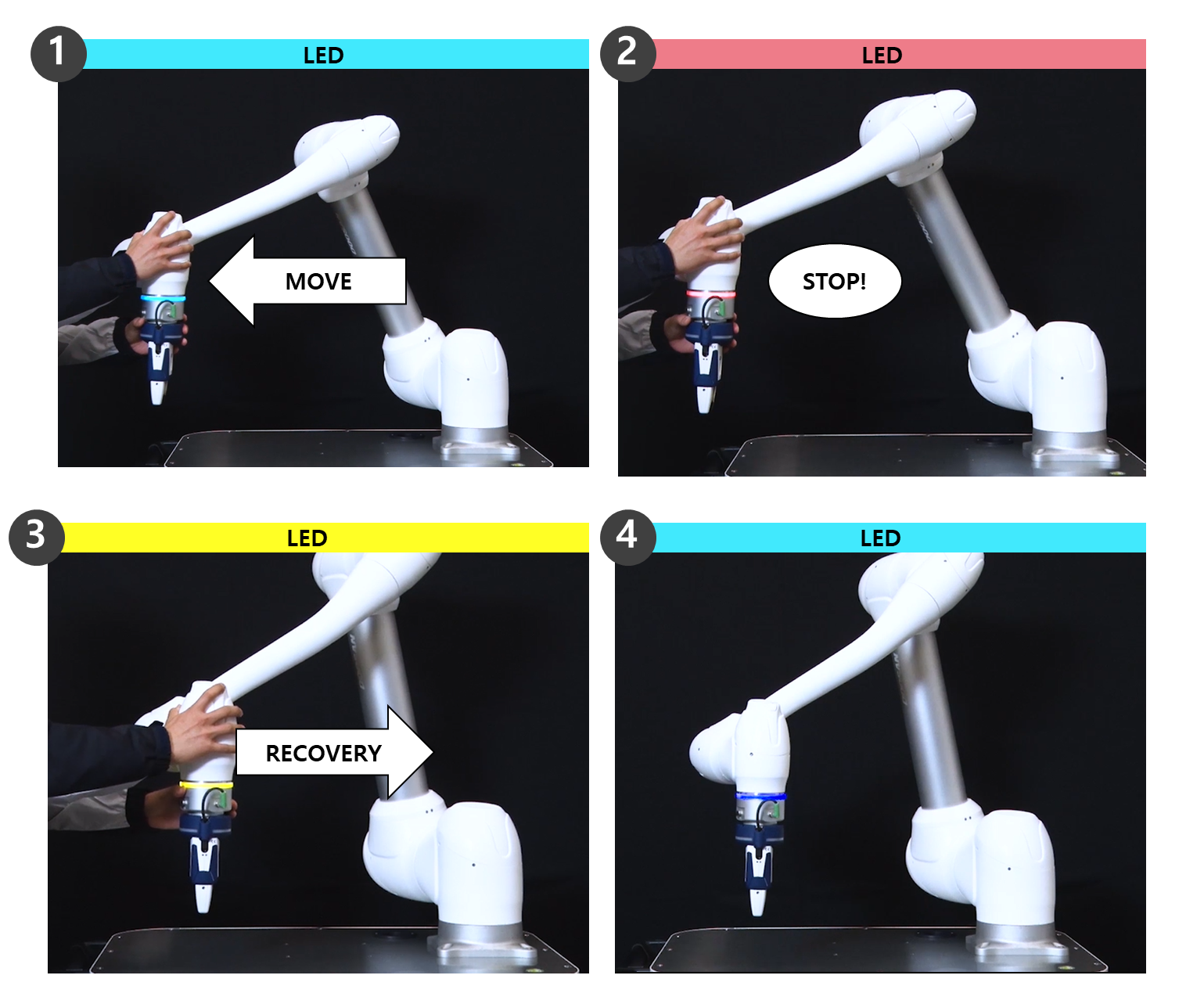
Il robot si muove liberamente nella zona di lavoro durante il lavoro.
Stato robot: Servocomando attivatoLED: Ciano -
Il robot si arresta quando esce dalla zona di lavoro.
Stato robot: Servocomando disattivatoLED: Rosso -
Impostare Servo su ON tramite Stato > recupero di sicurezza > recupero di sicurezza softwaree spostare il robot in un'area sicura.Stato robot: Servo on (modalità di recupero)LED: Giallo
-
Uscire dalla schermata di ripristino di sicurezza e premere Stato > Servo onper ripristinare il normale funzionamento del robot.Stato robot: Servocomando attivatoLED: Ciano
Per ulteriori informazioni sul ripristino della sicurezza del software, fare riferimento a Utilizzo della modalità Software Recovery (Ripristino software).