Per muovere il robot in base alle Coordinate Mondo, procedere come segue:
-
Selezionare la scheda Task nella schermata Jog (Movimento a impulsi).
-
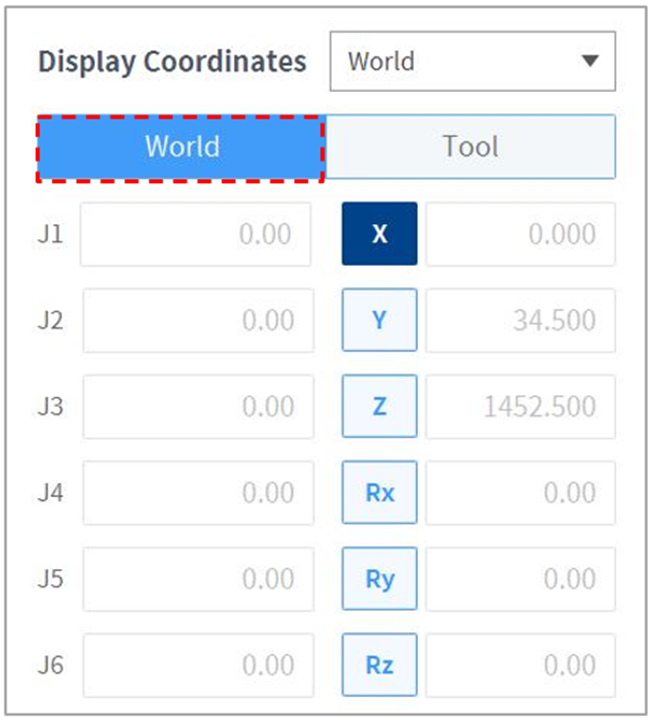
Selezionare le coordinate visualizzate da utilizzare come Coordinate Mondo e selezionare quindi World (Mondo) come punto di riferimento delle coordinate attività.
-
Selezionare le Coordinate Mondo da muovere.
-
Premere senza rilasciare il pulsante Direzione (

