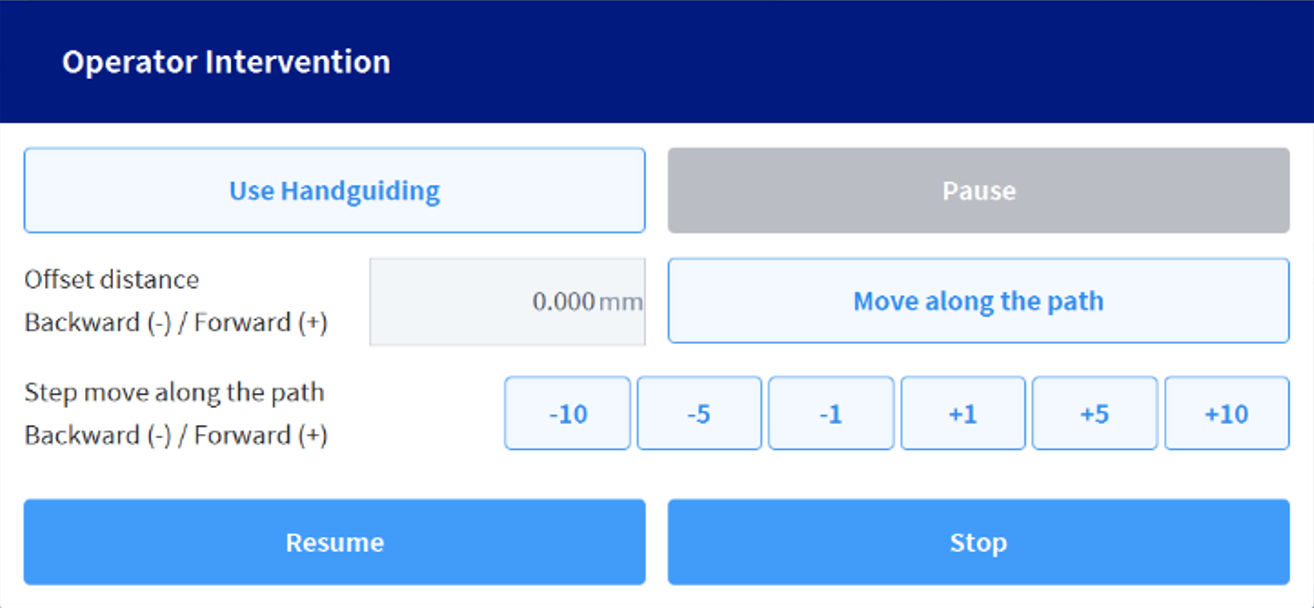
Jeśli wystąpi problem podczas pracy robota lub użytkownik wyda polecenie, robot zatrzyma pracę i wyświetli komunikat podręczny umożliwiający operatorowi interwencję i rozwiązanie sytuacji. Po rozwiązaniu problemu przez użytkownika zadanie jest kontynuowane w wierszu programu, w którym wystąpił problem.
Uwaga
-
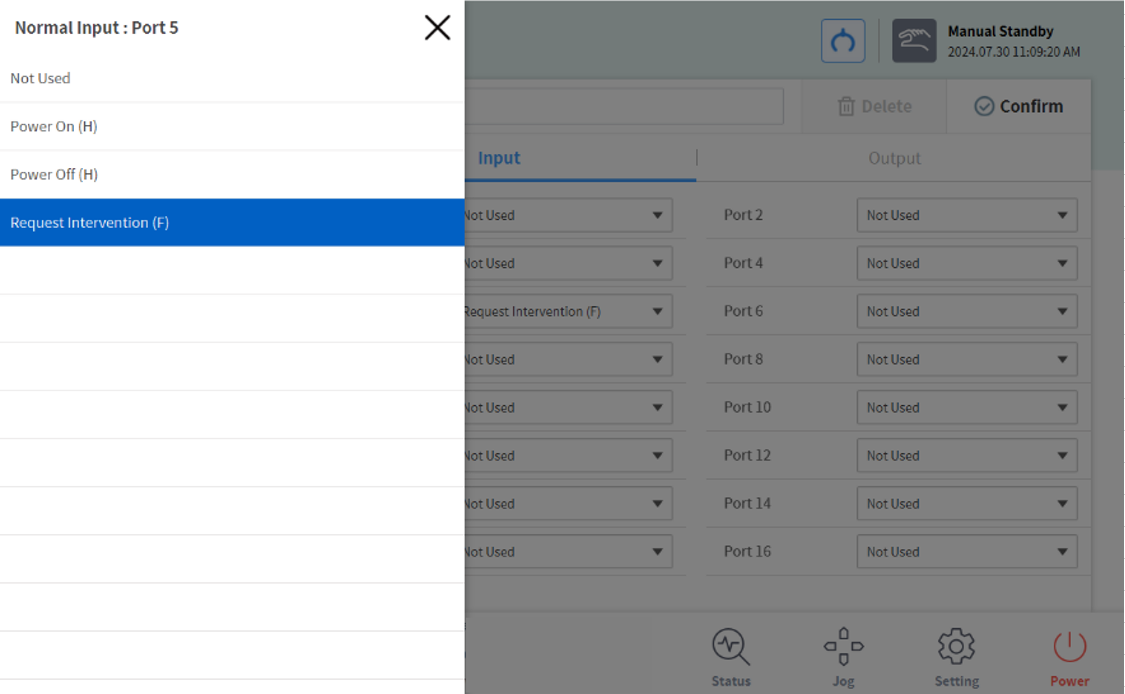
Aby użyć funkcji interwencji pracownika, należy wykonać jedno z poniższych ustawień.
-
Workcell Manager - Normal I/O - Input - Request Intervention (F)
-
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(Szczegółowe ustawienia można znaleźć w Welding Techinical Note. )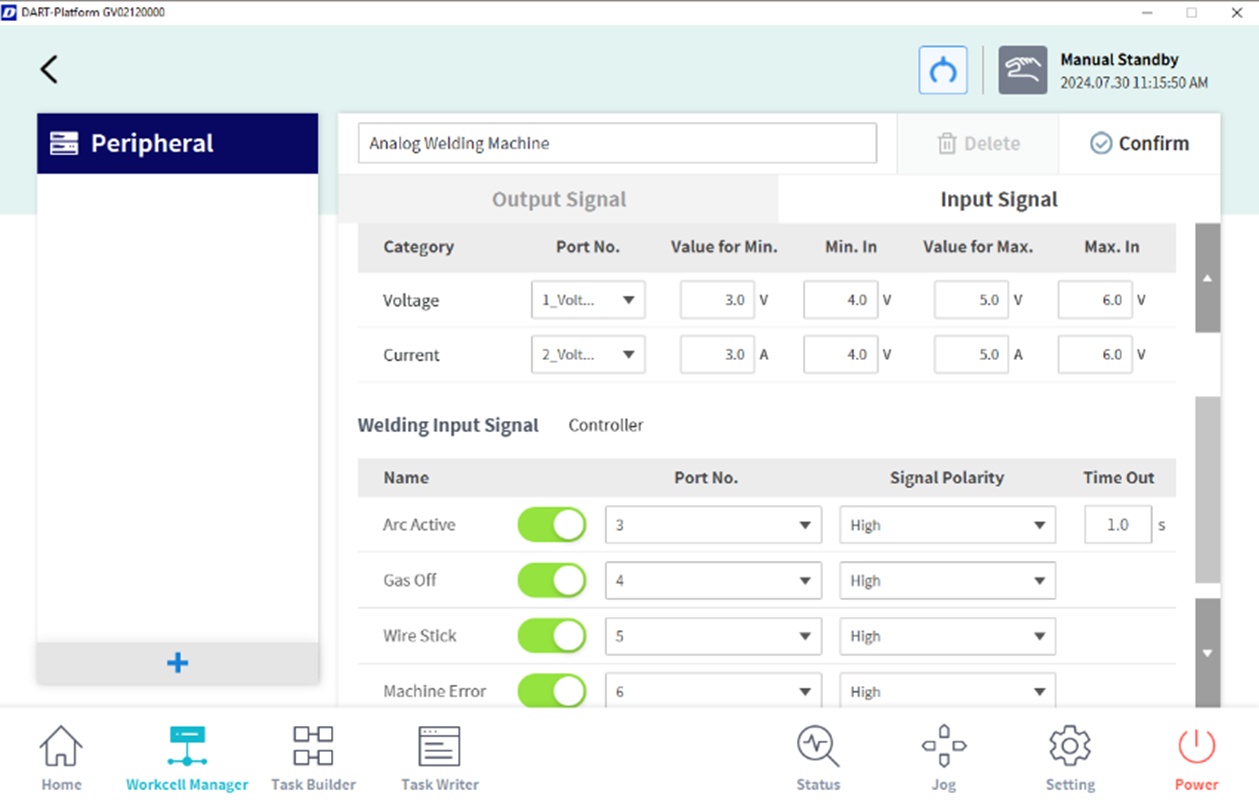
-
-
Przycisk „Przesuń wzdłuż ścieżki” i przycisk „Przesuń krok (-10,-5,-1,+1,+5,+10)” wykonują tę samą czynność. Jednak pierwszy przesuwa się do przodu lub do tyłu od pozycji odniesienia o ręcznie wprowadzony Offset, podczas gdy drugi celuje w punkt do przodu lub do tyłu o wstępnie ustawiony Offset kroku. Po wykonaniu czynności za pomocą powyższych przycisków naciśnięcie dodatkowego przycisku spowoduje przesunięcie bieżącej pozycji o Offset.
-
Przycisk „Użyj ręcznego prowadzenia” jest aktywowany tylko wtedy, gdy ustawiona jest strefa współpracy, a stan robota zmienia się na stan ręcznego prowadzenia, który umożliwia bezpośrednie nauczanie w strefie. Następnie możesz aktywować bezpośrednie nauczanie, naciskając przycisk z tyłu kokpitu lub pilota nauczania.
-
W trybie ręcznego prowadzenia przycisk „Użyj ręcznego prowadzenia” zmienia się na przycisk „Zakończ ręczne prowadzenie”.
-
Po naciśnięciu przycisku „Zakończ ręczne prowadzenie” stan ręcznego prowadzenia kończy się. W tym momencie, ze względów bezpieczeństwa, bieżąca pozycja robota, kąt i wartości punktu zatrzymania (czas, w którym pojawia się pierwsze wyskakujące okienko) są porównywane w celu wygenerowania wyskakującego okienka. Jeśli pojawi się wyskakujące okienko o następującej treści, musisz ponownie nauczyć się bezpośrednio, aby skorygować pozycję i postawę robota i spróbować ponownie.
-
Jeśli odległość w linii prostej między bieżącą pozycją TCP a punktem TCP w punkcie zatrzymania różni się o więcej niż 20 cm
-
Jeśli różnica między bieżącym kątem stawu a kątem stawu w punkcie zatrzymania różni się o więcej niż 1~3 osie (10 stopni) / 4~5 osi (30 stopni) / 6 osi (60 stopni)
-
-
Ta funkcja jest obsługiwana tylko podczas operacji MoveL / MoveC / MoveB.
-
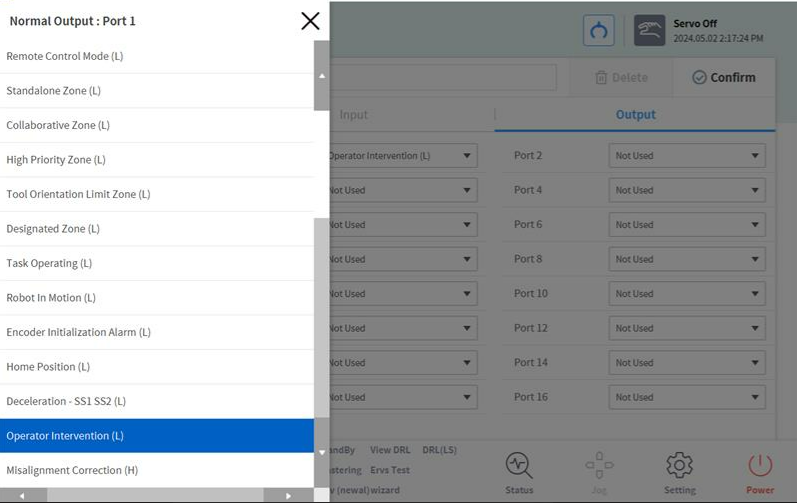
Możesz użyć funkcji Normal Output, aby zasygnalizować, że pojawiło się wyskakujące okienko. Sygnał pozostanie aktywny, gdy wyskakujące okienko będzie się pojawiać, i zostanie wyłączony, gdy wyskakujące okienko się zakończy.
-
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
-
Oto scenariusz użycia:
-
Odbierz cyfrowy sygnał wejściowy od użytkownika lub podłączonego urządzenia podczas działania programu.
-
Robot zatrzymuje się i pojawia się wyskakujące okienko interwencji operatora.
-
(Jeśli używasz bezpośredniego nauczania) Naciśnij przycisk Use Handguiding, a następnie naciśnij przycisk z tyłu kokpitu lub pilota nauczania, aby aktywować bezpośrednie nauczanie. Po zakończeniu operacji bezpośredniego nauczania naciśnij przycisk End Handguiding.
-
Naciśnij przycisk Move along the path, aby przesunąć robota wzdłuż ścieżki.
-
Po przesunięciu robota tak daleko, jak chcesz, naciśnij przycisk Resume, aby wznowić zadanie robota i zamknąć okno podręczne.