Aby robot wykonał ruch pod określonym kątem, należy:
-
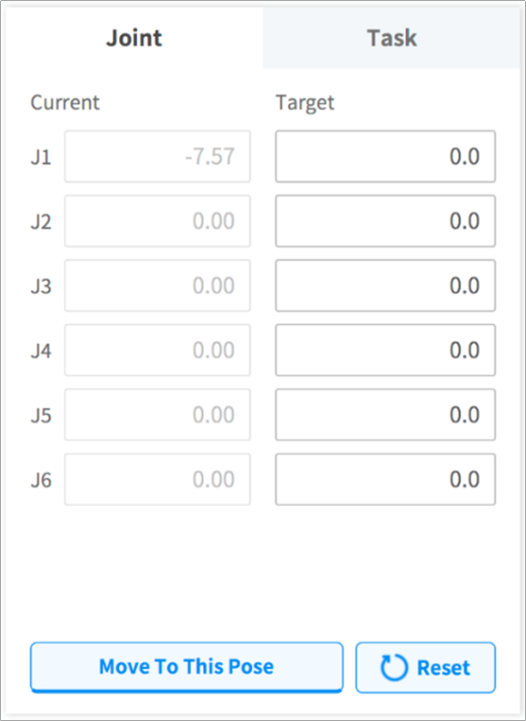
Wybrać kartę Move, a następnie kartę Joint.
-
Wprowadź docelowy kąt przegubu robota.
-
Aktywować Real Mode (tryb rzeczywisty).

-
Nacisnąć i przytrzymać przycisk Move to Corresponding Pose, aby ustawić kąt przegubu robota.