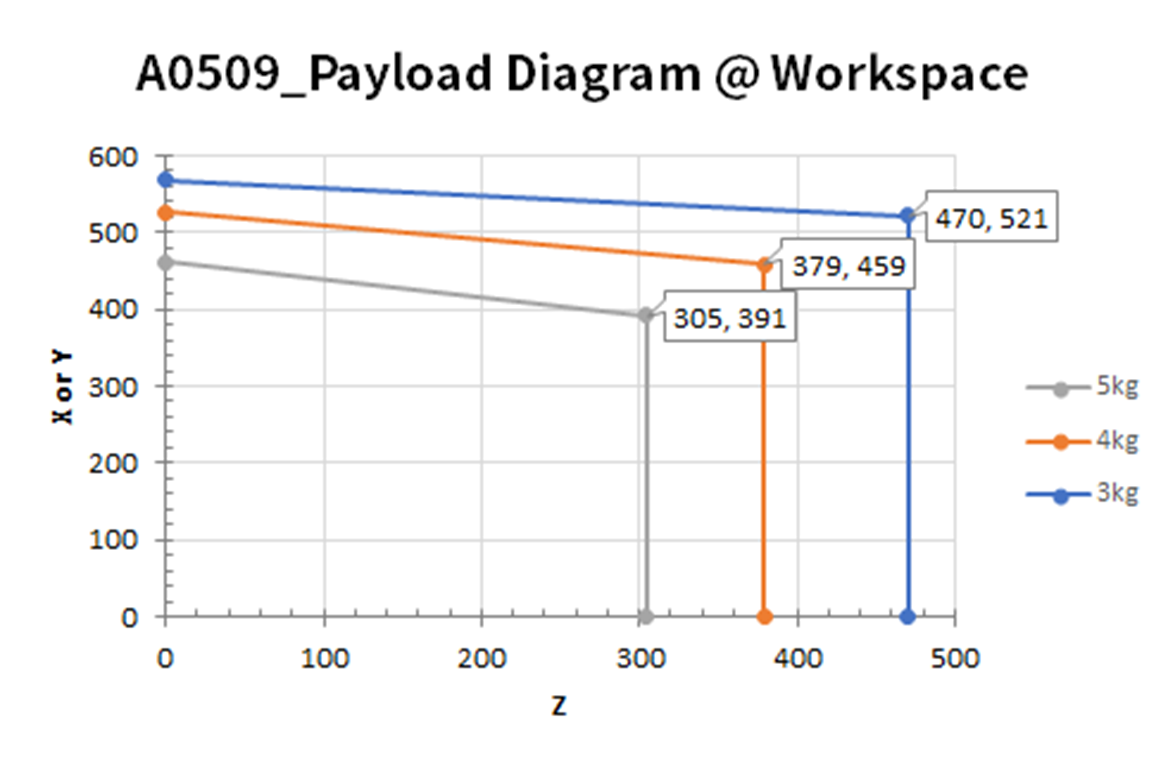
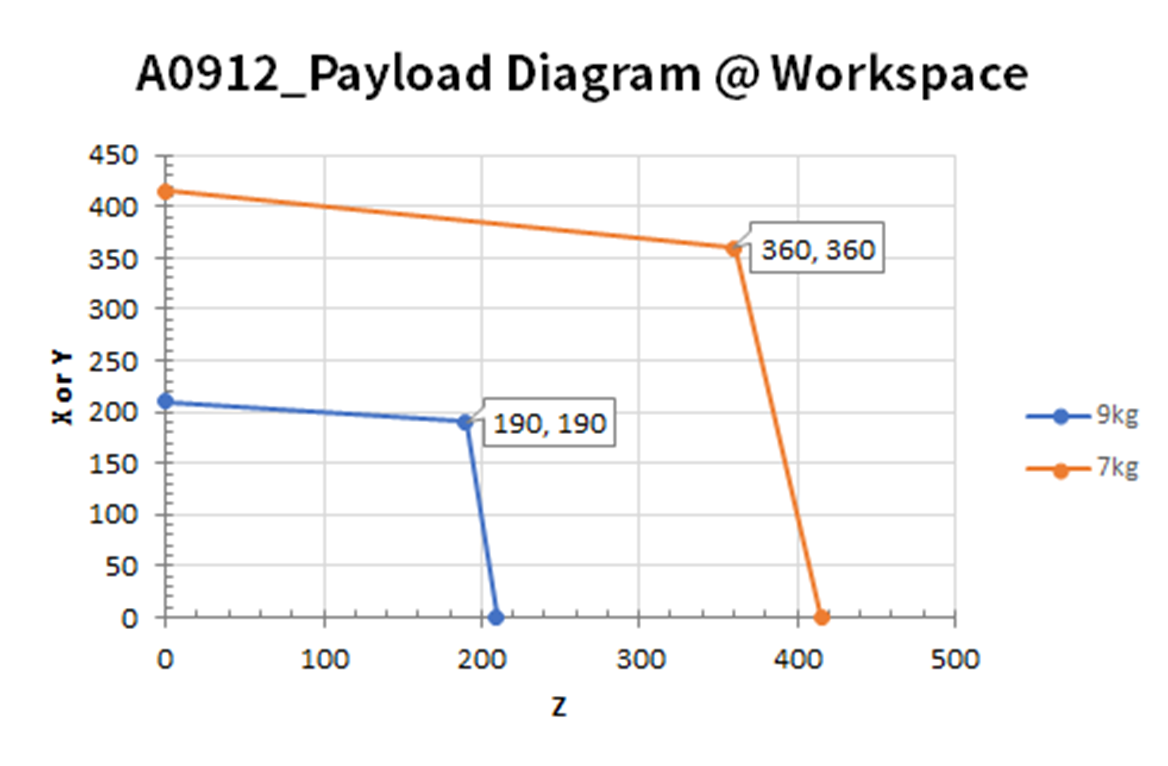
Maksymalne obciążenie robota w przestrzeni roboczej zmienia się w zależności od odległości od środka ciężkości. Obciążenie w zależności od odległości:
Ten schemat obciążenia zakłada małą objętość obciążenia narzędziem. Narzędzia o większej objętości charakteryzują się większymi ograniczeniami obciążenia powyżej środka ciężkości narzędzia w porównaniu z narzędziem o równej masie, ale mniejszej objętości – w takich przypadkach mogą wystąpić drgania.
A0509
A0912
Dozwolone momenty i bezwładność
Dozwolone momenty i bezwładność dla robotów J4–J6 są następujące:
|
Nazwa modelu
|
J4 |
J5 |
J6
|
|||
|---|---|---|---|---|---|---|
|
Dozwolony moment |
Bezwładność |
Dozwolony moment |
Bezwładność |
Dozwolony moment |
Bezwładność |
|
|
A0509 |
50 Nm |
0.69 kg㎡ |
50 Nm |
0.69 kg㎡ |
50 Nm |
0.69 kg㎡ |
|
A0912 |
||||||
|
A0509s |
11 Nm |
0.15 kg㎡ |
11 Nm |
0.15 kg㎡ |
11 Nm |
0.15 kg㎡ |
|
A0912s |
||||||