|
Lp |
Element |
Opis |
|---|---|---|
|
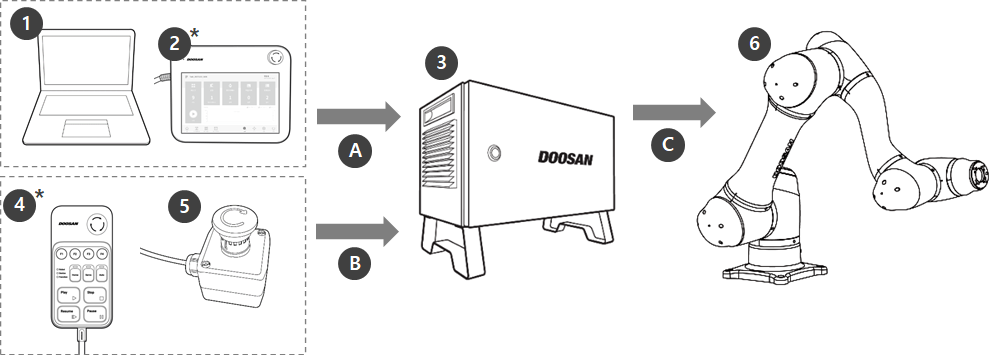
1 |
Laptop |
Po zainstalowaniu DART platform można skonfigurować środowisko pracy identyczne z programatorem ręcznym. Laptop nie wchodzi w skład zestawu, choć jest niezbędny do zainstalowania DART platform. |
|
2 |
Programator ręczny** |
Urządzenie do zarządzania całym systemem, za pomocą którego można uczyć robota określonych pozycji oraz ustawiać manipulator i inne elementy związane z instalacją sterownika i manipulatora.
|
|
3 |
Sterownik* |
Do sterowania ruchami robota zgodnie z pozycją lub ruchem ustawionym na programatorze ręcznym. Zawiera różne gniazda we/wy umożliwiające podłączanie i korzystanie z różnego wyposażenia i urządzeń. |
|
4 |
Smart Pendant** |
Urządzenie do łatwego sterowania robotem sposób za pomocą pilota obsługującego proste funkcje takie jak włączanie/wyłączanie serwa lub wykonywanie/zamykanie skonfigurowanych wcześniej programów.
|
|
5 |
Przycisk zatrzymania awaryjnego* |
Jeśli w systemie używany jest laptop, przycisk ten działa jako przycisk zatrzymania awaryjnego na programatorze ręcznym |
|
6 |
Manipulator* |
Przemysłowy robot współpracujący przeznaczony do wykonywania prac związanych z transportem i montażem przy użyciu różnych narzędzi. |
|
A |
Command/
|
|
|
B |
Command |
|
|
C |
Power Supply/
|
|
-
Elementy są oznaczone jako części standardowe (*) i części opcjonalne (**, sprzedawane osobno)