Aby robot wykonał ruch na bazie narzędzia robota, należy:
-
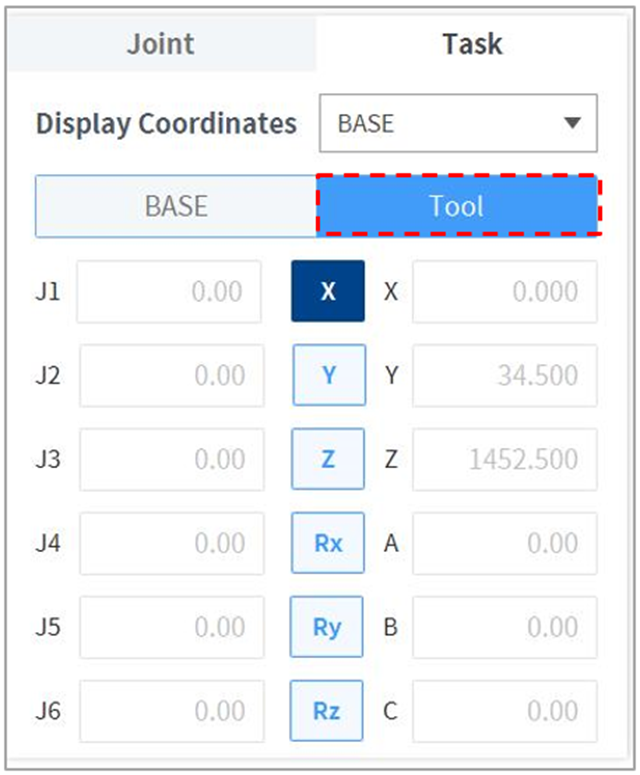
Wybrać kartę Task na ekranie Jog.
-
Wybrać współrzędne wyświetlania Base (podstawy) lub World (globalne) i ustawić Tool na podstawie punktu odniesienia do współrzędnych zadania.
-
Wybrać Tool Coordinates (Współrzędne narzędzia), aby wykonać ruch.
-
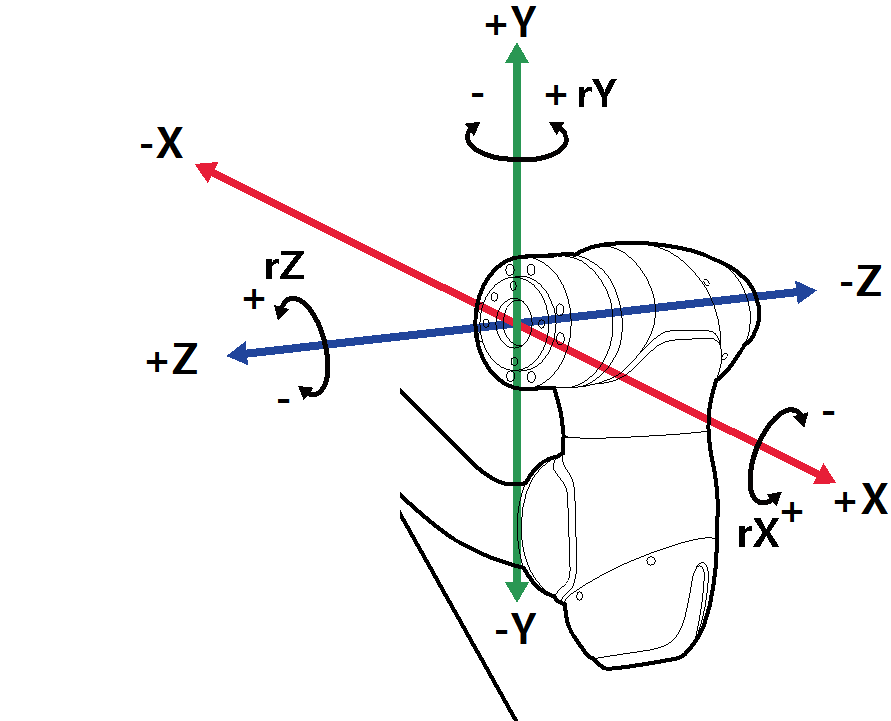
Nacisnąć i przytrzymać przycisk kierunku(


Uwaga
-
Obszar bezpieczeństwa nie ma zastosowania w trybie wirtualnym.
-
Rx, Ry i Rz są wykonywane zgodnie z TCP (pozycją środkową narzędzia).