Użycie funkcji Jog+ pozwala na jednoczesne korzystanie z funkcji impulsowania podczas wykonywania innych prac. Można to wykorzystać, gdy podczas uczenia robota wymagany jest precyzyjny ruch do punktu docelowego.
Jog Plus można aktywować na następujące sposoby.
-
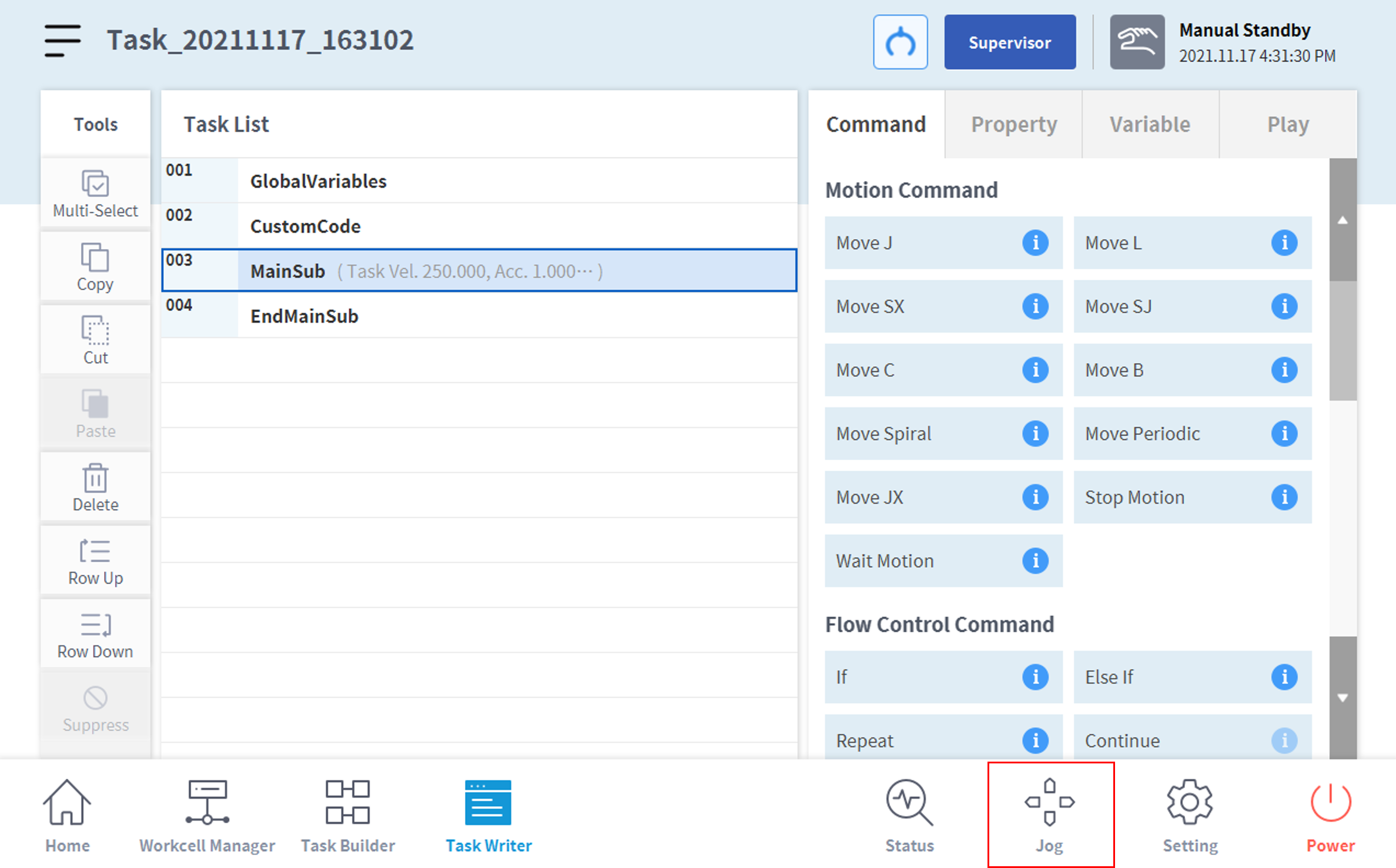
Naciśnij przycisk jog przez ponad 1 sekundę w menu głównym na dole ekranu.
-
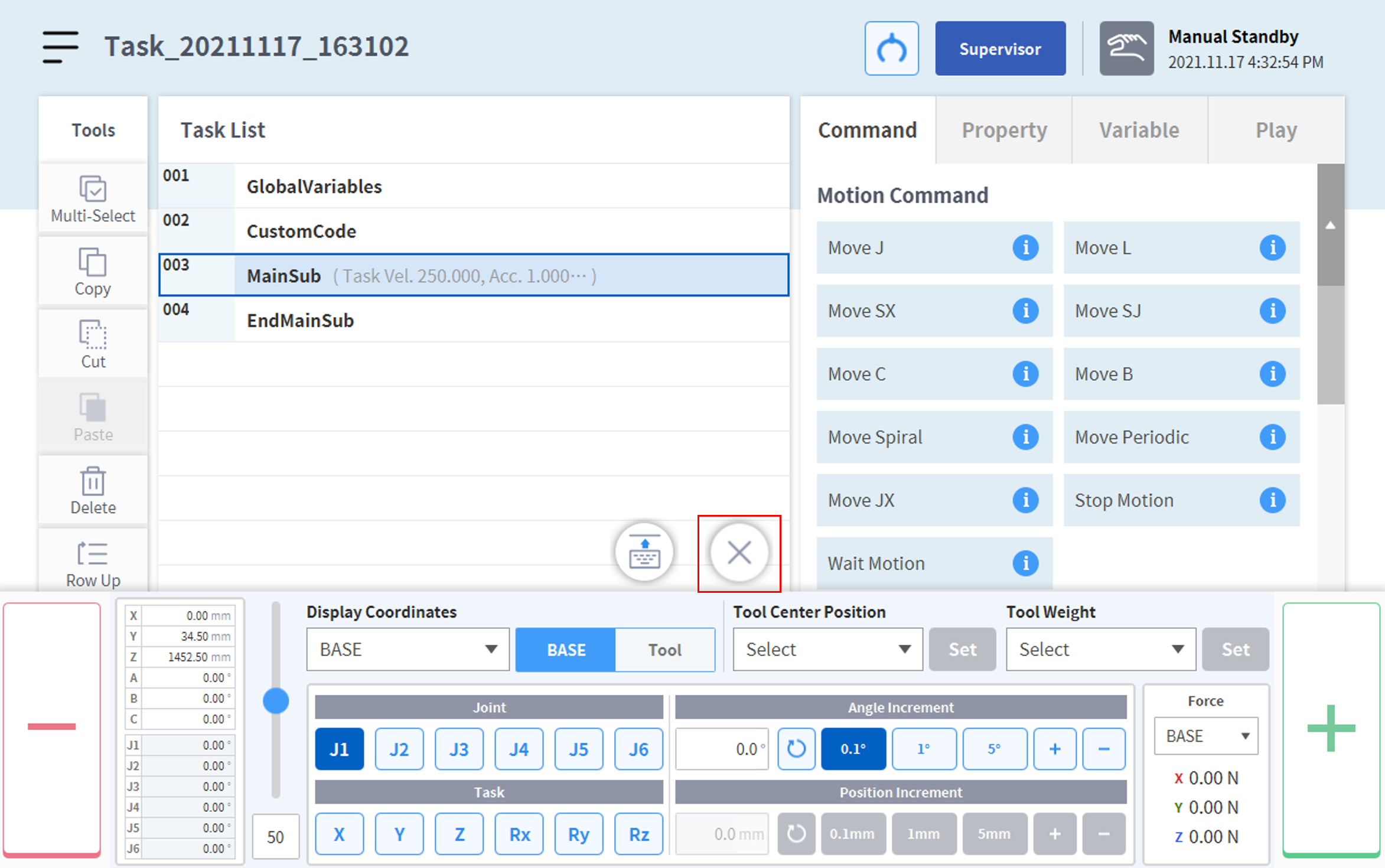
Ekran Jog Plus jest aktywny
-
Jog Plus można wyłączyć, naciskając przycisk „X”
|
Lp. |
Element |
Opis |
|---|---|---|
|
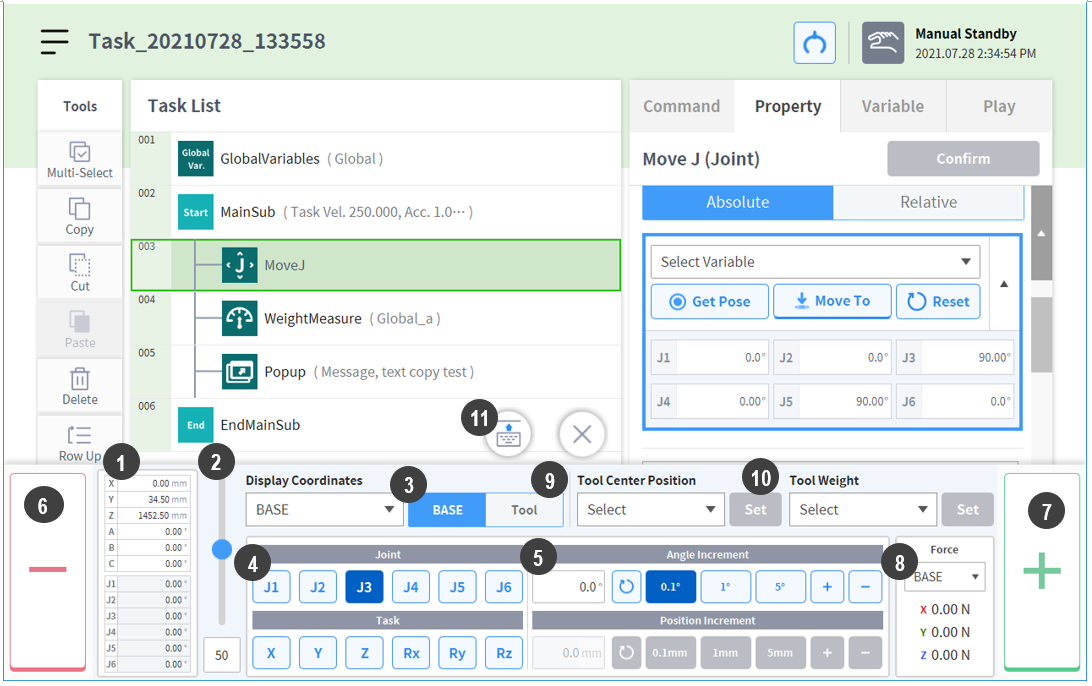
1 |
Current robot pose |
Wyświetla pozycję robota na podstawie ustawionych współrzędnych wyświetlania. |
|
2 |
Manual Mode Speed |
Konfiguruje prędkość ruchu robota w trybie ręcznym. Prędkość można regulować przez przeciągnięcie wskaźnika na suwaku. Jeśli wskaźnik na suwaku znajduje się w pozycji 100%, odpowiadająca jej maksymalna prędkość przegubu na karcie Jog wynosi 30 stopni/s, a maksymalna prędkość zadania wynosi 250 mm/s. Prędkość ta wpływa na prędkość sterowaną za pomocą przycisku impulsowania i przycisku ruchu. |
|
3 |
Reference Point Setting |
Służy do konfiguracji punktu odniesienia w celu wyrównania współrzędnej zadania. Base: Służy do konfigurowania współrzędnej zadania na bazie podstawy robota. World: Służy do ustawiania współrzędnych zadania na bazie ustawionych współrzędnych globalnych. Tool: Służy do ustawiania współrzędnej zadania na podstawie narzędzia zainstalowanego na końcu sześciu osi robota. |
|
4 |
Select Axis |
Wybiera oś, która ma zostać przesunięta. Karta Joint: Wybrać jedną z osi z zakresu od J1 do J6. Karta Task: Wybrać jedną z osi z zakresu od X do Rz. |
|
5 |
Select Increment |
Wprowadza wartość określającą, o ile ma zostać przesunięta wybrana oś. |
|
6 |
Move – Button |
Jeśli przycisk jest przytrzymany, wybrana oś zostaje przesunięta w kierunku – zgodnie z lokalizacją przyrostu. |
|
7 |
Move – Button |
Jeśli przycisk zostanie przytrzymany, wybrana oś zostaje przesunięta w kierunku + zgodnie z lokalizacją przyrostu. |
|
8 |
Force Monitoring |
Wyświetla występującą siłę zewnętrzną na podstawie wybranego układu współrzędnych. |
|
9 |
TCP Setting: |
Ustawia TTCP. |
|
10 |
Tool Weight Indicator |
Ustawia masę narzędzia. |
|
11 |
Change Jog+ location |
Zmienia lokalizację Jog+ na górną lub dolną część ekranu. |