Ostrzeżenia dotyczące instalacji
-
Przed zainstalowaniem sterownika sprawdzić, czy jest dostępna wystarczająca ilość miejsca. Brak miejsca może spowodować uszkodzenie sterownika, kabla manipulatora lub ręcznego programatora.
-
Podczas podłączania zasilania do urządzenia należy sprawdzić źródło zasilania. Podłączenie zasilania o parametrach innych niż znamionowe (22–60 VDC) może spowodować nieprawidłowe działanie systemu lub uszkodzenie sterownika.
Środowisko montażu
Zalecenia dotyczące montażu sterownika:
-
Przed przystąpieniem do montażu sterownika zapewnić odpowiednią ilość miejsca.
-
Sterownik musi być unieruchomiony.
-
Upewnić się, że podczas montażu wszystkie elementy zostały zainstalowane w przenośnym urządzeniu.
Montaż sprzętu
Przed uruchomieniem robota zamontować manipulator, sterownik i wiszące panele (przycisk zatrzymania awaryjnego) będące koniecznymi elementami systemu, a następnie podłączyć zasilanie. Sposób montażu poszczególnych komponentów:
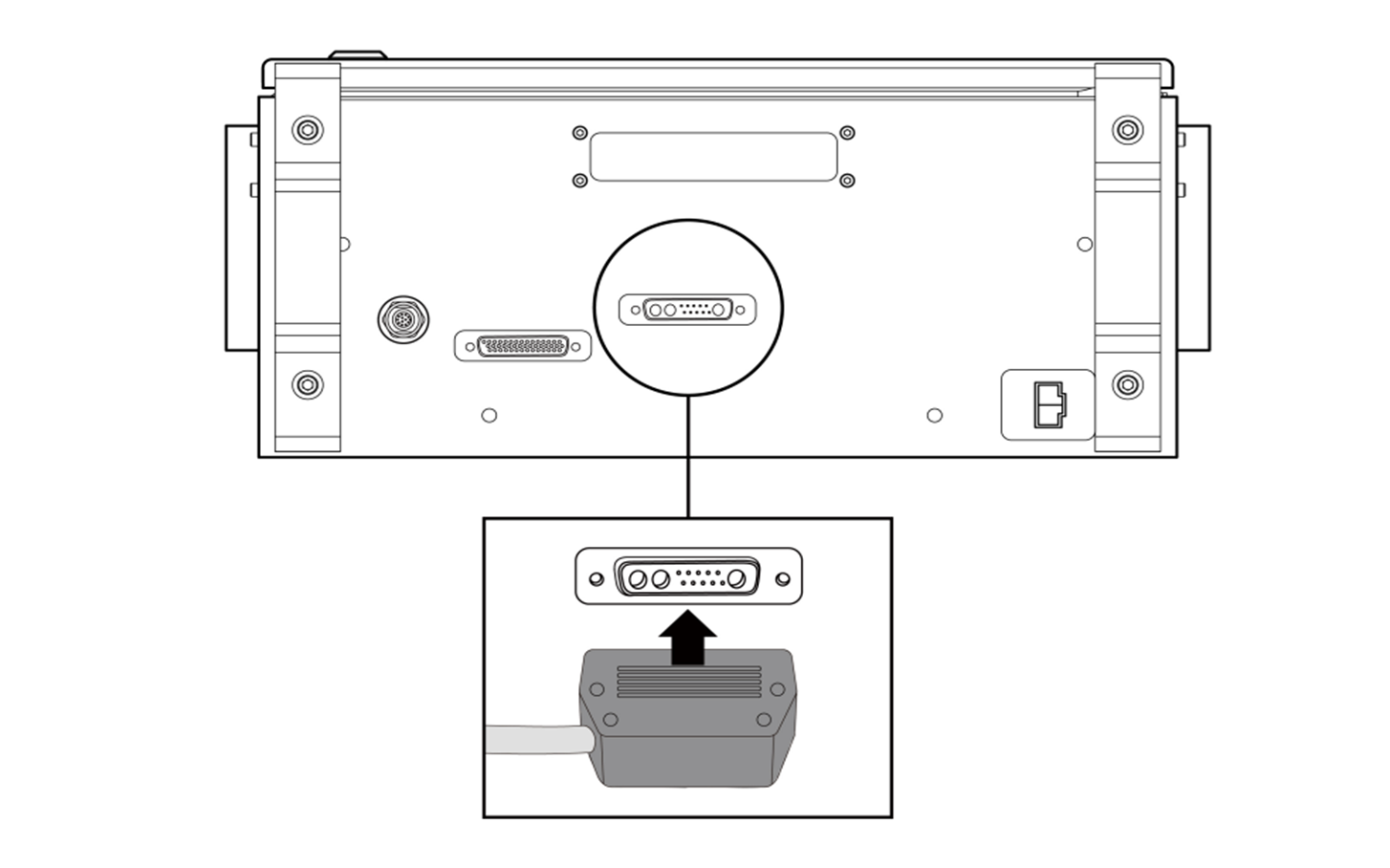
Podłączanie manipulatora i sterownika
Wcisnąć kabel połączeniowy manipulatora do odpowiedniego gniazdka na sterowniku aż do usłyszenia wyraźnego kliknięcia. Zapobiegnie to poluzowaniu się kabla.
-
Nie odłączać przewodu manipulatora, gdy robot jest włączony. Może to doprowadzić do uszkodzenia robota.
-
Nie zmieniać ani nie przedłużać przewodu manipulatora.
-
W przypadku instalowania sterownika na posadzce należy pozostawić co najmniej 50 mm odstępu z każdej strony sterownika, aby zapewnić wentylację.
-
Przed włączeniem sterownika upewnić się, że połączenia są poprawnie wykonane.
-
Podczas konfiguracji systemu zaleca się zainstalowanie eliminatora zakłóceń, aby zapobiec zakłóceniom komunikacji między urządzeniami i awarii systemu.
-
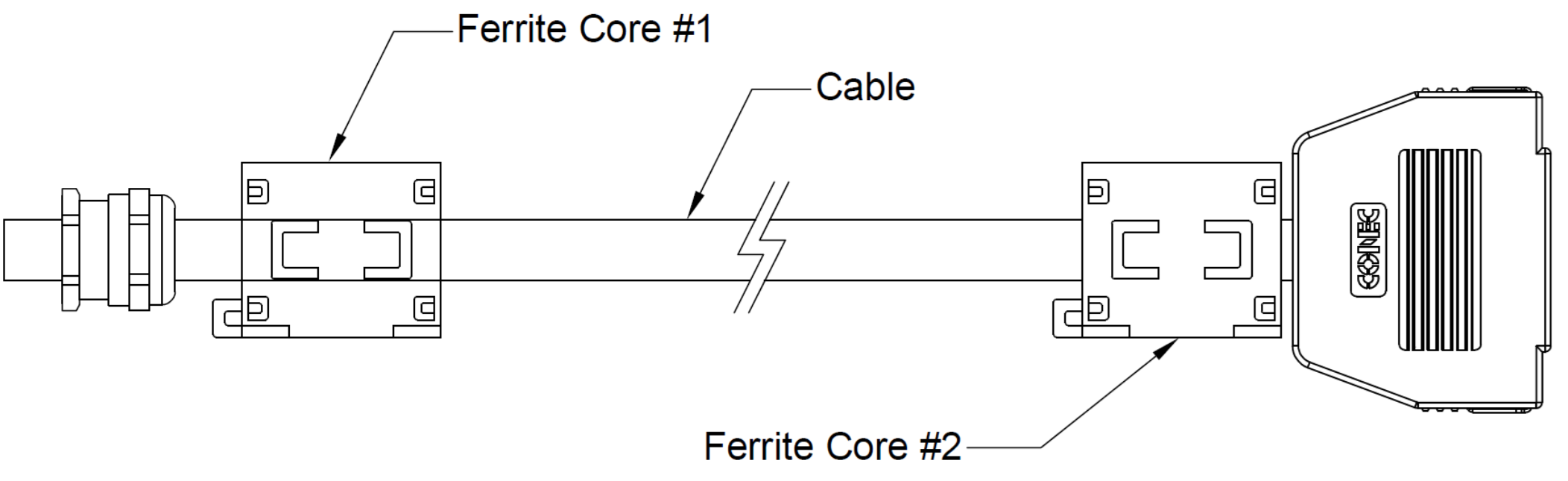
W przypadku gdy sterownik jest poddany działaniu zakłóceń generowanych przez fale elektromagnetyczne, zaleca się zainstalowanie rdzenia ferrytowego na każdym końcu kabla manipulatora w celu zapewnienia normalnego działania. Miejsca instalacji są następujące:
Podłączanie sterownika i przycisku zatrzymania awaryjnego
Podłączyć kabel przycisku zatrzymania awaryjnego do odpowiedniego gniazdka na sterowniku i przymocować śrubą zabezpieczającą, obracając ją w prawo, aby zapobiec rozłączeniu kabla.
-
Skonfigurować przełącznik ustawień przycisku zatrzymania awaryjnego zgodnie z punktem „Przełącznik ustawiania przycisku zatrzymania awaryjnego”.
-
Jeśli ustawienie przełącznika różni się od rzeczywistej konfiguracji, przycisk zatrzymania awaryjnego może nie zadziałać poprawnie w sytuacji awaryjnej, co może spowodować urazy. Sprawdzić ustawienia i działanie przycisku zatrzymania awaryjnego.
-
Przed podłączeniem kabla sprawdzić, czy układ gniazdka jest odpowiedni.
-
W przypadku stosowania przycisku zatrzymania awaryjnego uważać, aby nie potknąć się o kable połączeniowe.
-
Nie dopuścić do zetknięcia się sterownika, przycisku zatrzymania awaryjnego ani kabla z wodą.
-
Nie montować sterownika ani przycisku zatrzymania awaryjnego w otoczeniu zapylonym lub wilgotnym.
-
Sterownik i przycisk zatrzymania awaryjnego nie mogą być wystawione na działanie pyłu w ilości przekraczającej parametry stopnia ochrony IP40. Zachować szczególną ostrożność w miejscach, w których występuje pył przewodzący.
-
Nie odłączać kabla przycisku zatrzymania awaryjnego w czasie pracy robota.
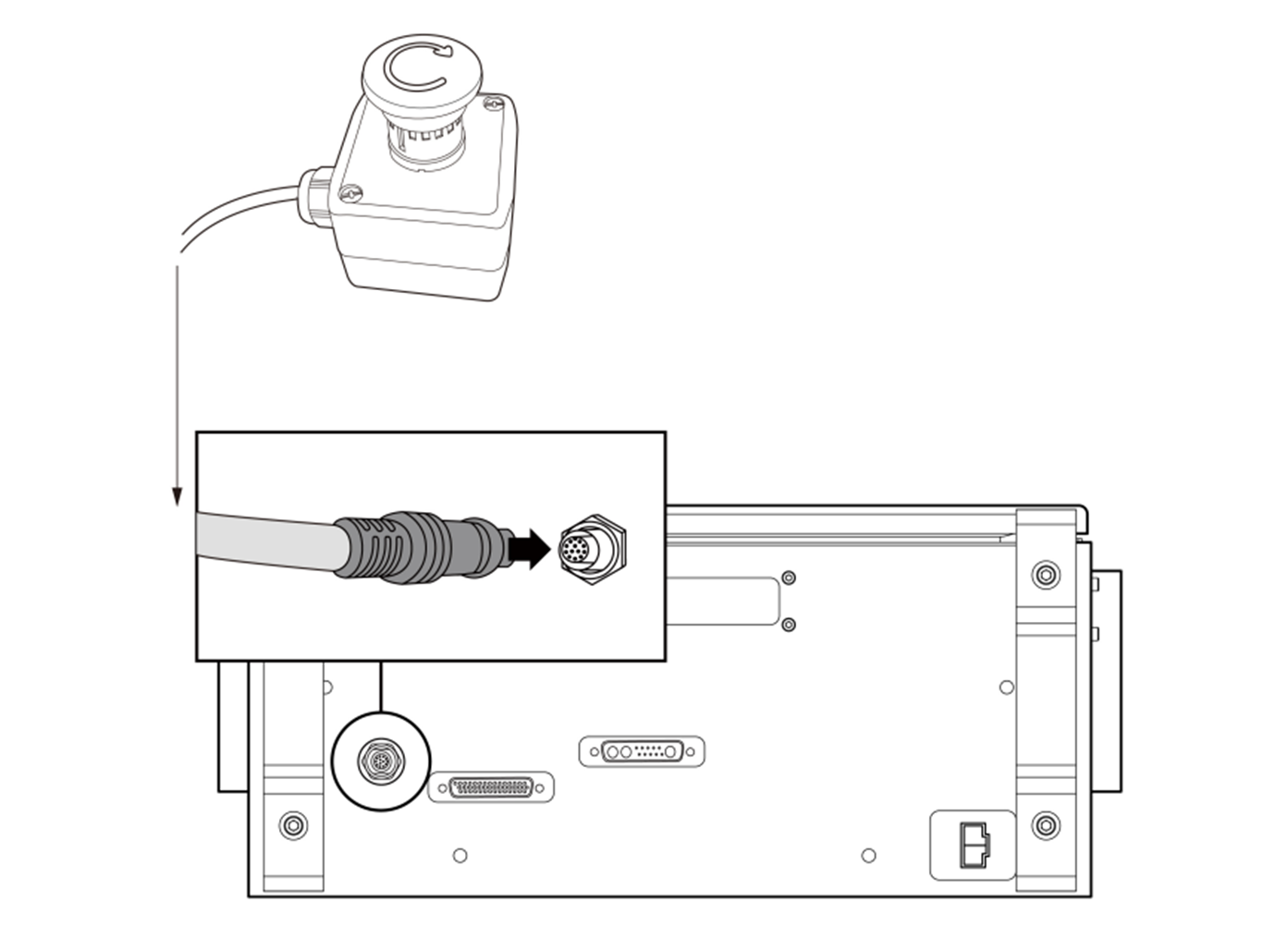
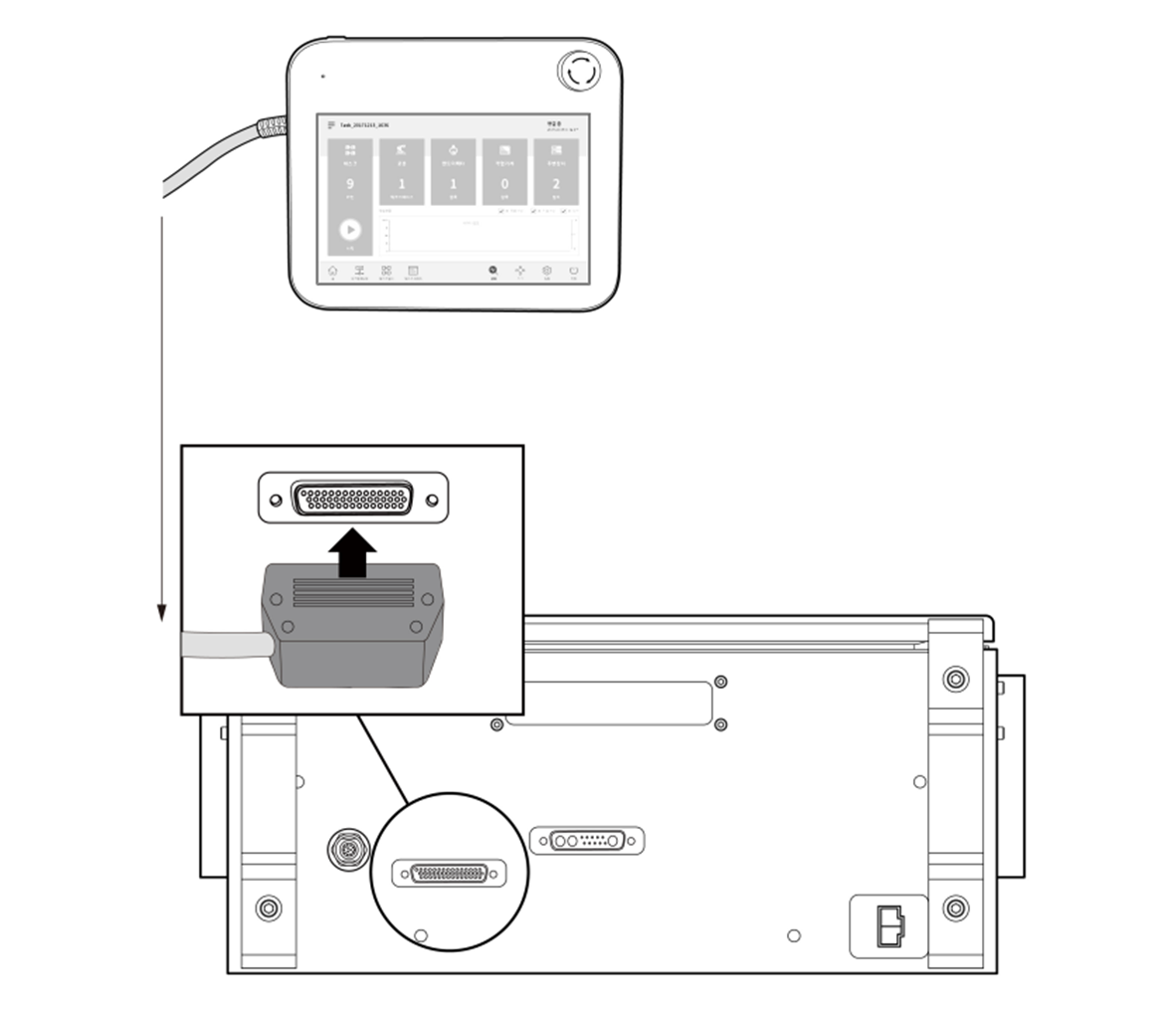
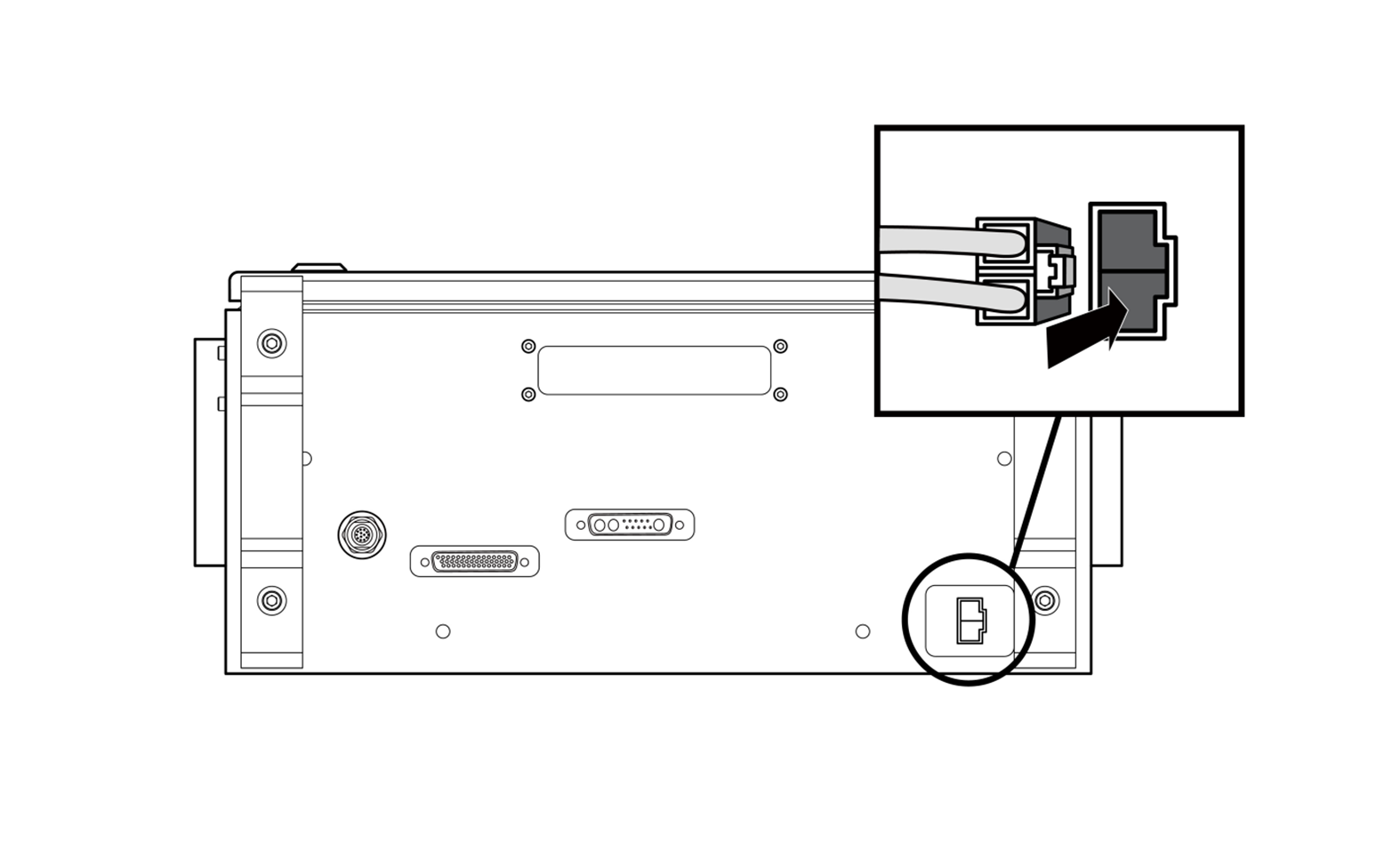
Podłączanie sterownika i urządzenia Smart Pendant
Podłączyć kabel urządzenia Smart Pendant do odpowiedniego sterownika i złącza oraz wprowadzić śrubę zabezpieczającą, a następnie obrócić ją w prawo, aby zabezpieczyć kabel przed poluzowaniem.
-
Skonfigurować przełącznik ustawień przycisku zatrzymania awaryjnego zgodnie z punktem „Przełącznik ustawiania przycisku zatrzymania awaryjnego”. Jeśli ustawienie przełącznika różni się od rzeczywistej konfiguracji, przycisk zatrzymania awaryjnego może nie zadziałać poprawnie w sytuacji awaryjnej, co może spowodować urazy. Sprawdzić ustawienia i działanie przycisku zatrzymania awaryjnego.
-
Przed podłączeniem kabla sprawdzić, czy wtyki na jego końcówce nie są uszkodzone ani wygięte.
-
Jeśli urządzenie Smart Pendant podczas użytkowania jest zawieszone na ścianie lub na sterowniku, należy uważać, aby nie potknąć się o kable użyte do wykonania połączenia.
-
Nie dopuścić do zetknięcia się sterownika, urządzenia Smart Pendant lub kabli z wodą.
-
Nie montować sterownika ani urządzenia Smart Pendant w otoczeniu zapylonym lub wilgotnym.
-
Sterownik i urządzenie Smart Pendant nie mogą być wystawione na działanie pyłu w ilości przekraczającej parametry stopnia ochrony IP20. Zachować szczególną ostrożność w miejscach, w których występuje pył przewodzący.
-
Zachować promień krzywizny kabla urządzenia Smart Pendant większy od minimalnego (120 mm).
-
Podczas konfiguracji systemu zaleca się zainstalowanie eliminatora zakłóceń, aby zapobiec zakłóceniom komunikacji między urządzeniami i awarii systemu.
-
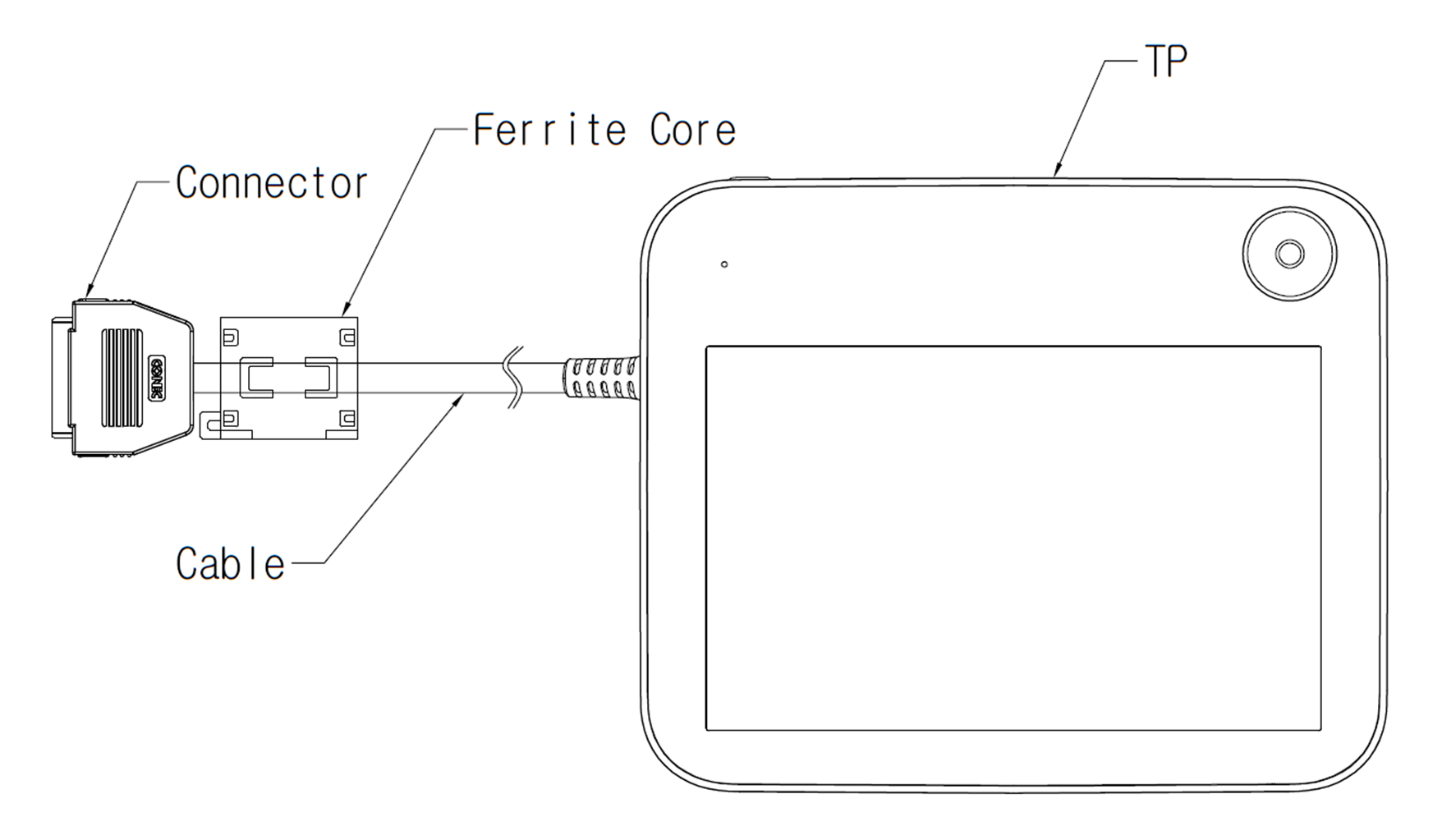
Jeśli na działanie urządzenia Smart Pendant wpływają zakłócenia wytwarzane przez fale elektromagnetyczne, niezbędne jest zainstalowanie rdzenia ferrytowego w celu zapewnienia prawidłowego działania. Miejsca instalacji są następujące:
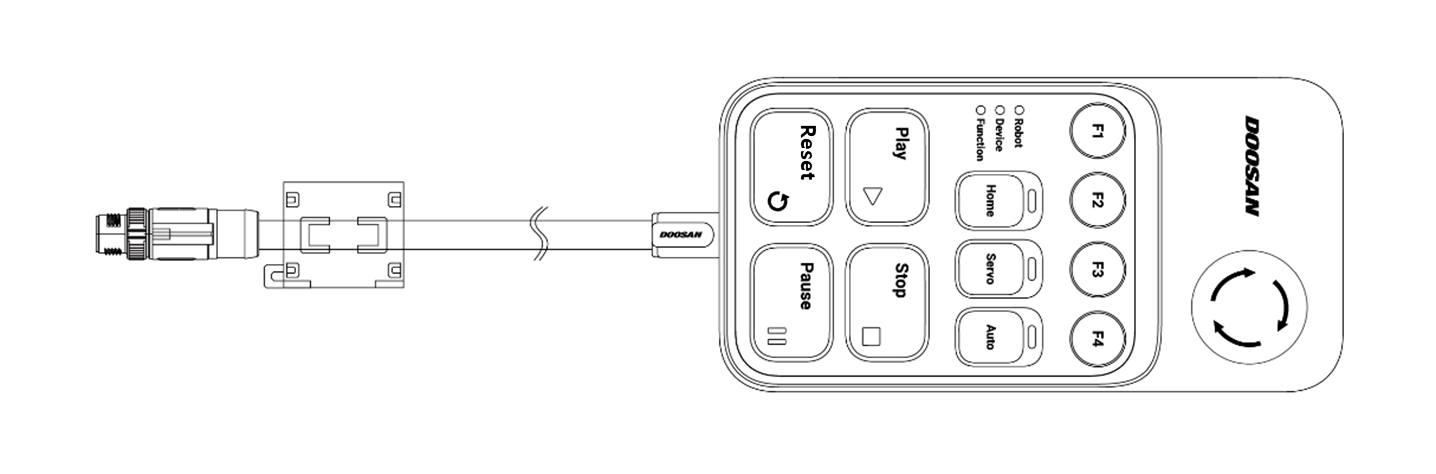
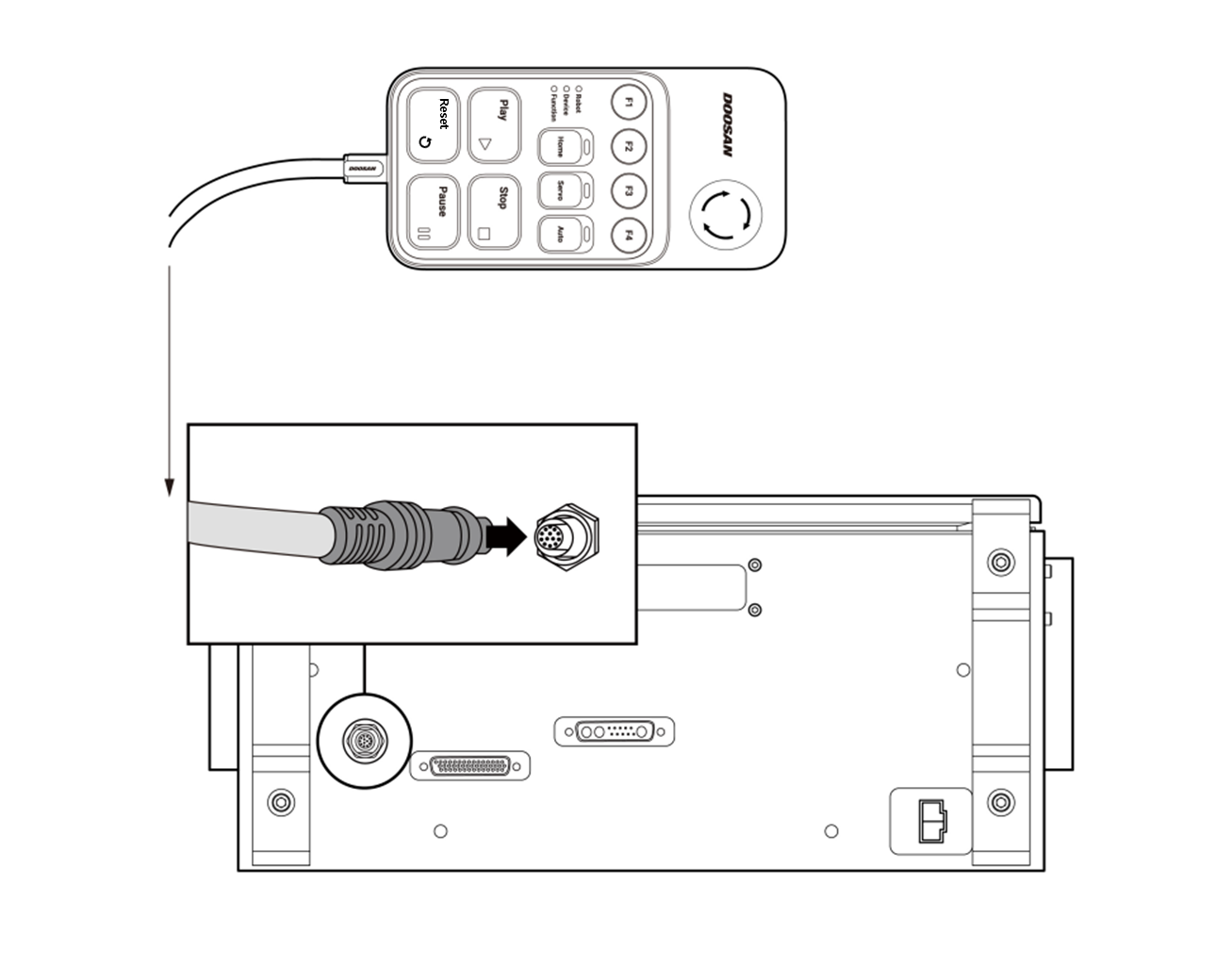
Podłączanie sterownika i programatora ręcznego
Wcisnąć kabel połączeniowy ręcznego programatora do odpowiedniego gniazdka na sterowniku aż do usłyszenia wyraźnego kliknięcia. Zapobiegnie to poluzowaniu się kabla.
-
Skonfigurować przełącznik ustawień przycisku zatrzymania awaryjnego zgodnie z punktem „Przełącznik ustawiania przycisku zatrzymania awaryjnego”. Jeśli ustawienie przełącznika różni się od rzeczywistej konfiguracji, przycisk zatrzymania awaryjnego może nie zadziałać poprawnie w sytuacji awaryjnej, co może spowodować urazy. Sprawdzić ustawienia i działanie przycisku zatrzymania awaryjnego.
-
Przed podłączeniem kabla sprawdzić, czy wtyki na jego końcówce nie są uszkodzone ani wygięte.
-
Jeśli programator ręczny podczas użytkowania jest zawieszony na ścianie lub na sterowniku, należy uważać, aby nie potknąć się o kable użyte do wykonania połączenia.
-
Nie dopuścić do zetknięcia się sterownika, programatora lub kabla z wodą.
-
Nie montować sterownika ani ręcznego programatora w otoczeniu zapylonym lub wilgotnym.
-
Nie wystawiać sterownika ani programatora ręcznego na działanie pyłu w ilości przekraczającej parametry właściwe dla stopnia ochrony IP20. Zachować szczególną ostrożność w miejscach, w których występuje pył przewodzący.
-
Podczas konfiguracji systemu zaleca się zainstalowanie eliminatora zakłóceń, aby zapobiec zakłóceniom komunikacji między urządzeniami i awarii systemu.
-
W przypadku gdy sterownik jest poddany działaniu zakłóceń generowanych przez fale elektromagnetyczne, zaleca się zainstalowanie rdzeni ferrytowych na elementach połączeniowych kabla ręcznego programatora w celu zapewnienia normalnego działania. Miejsca instalacji są następujące:
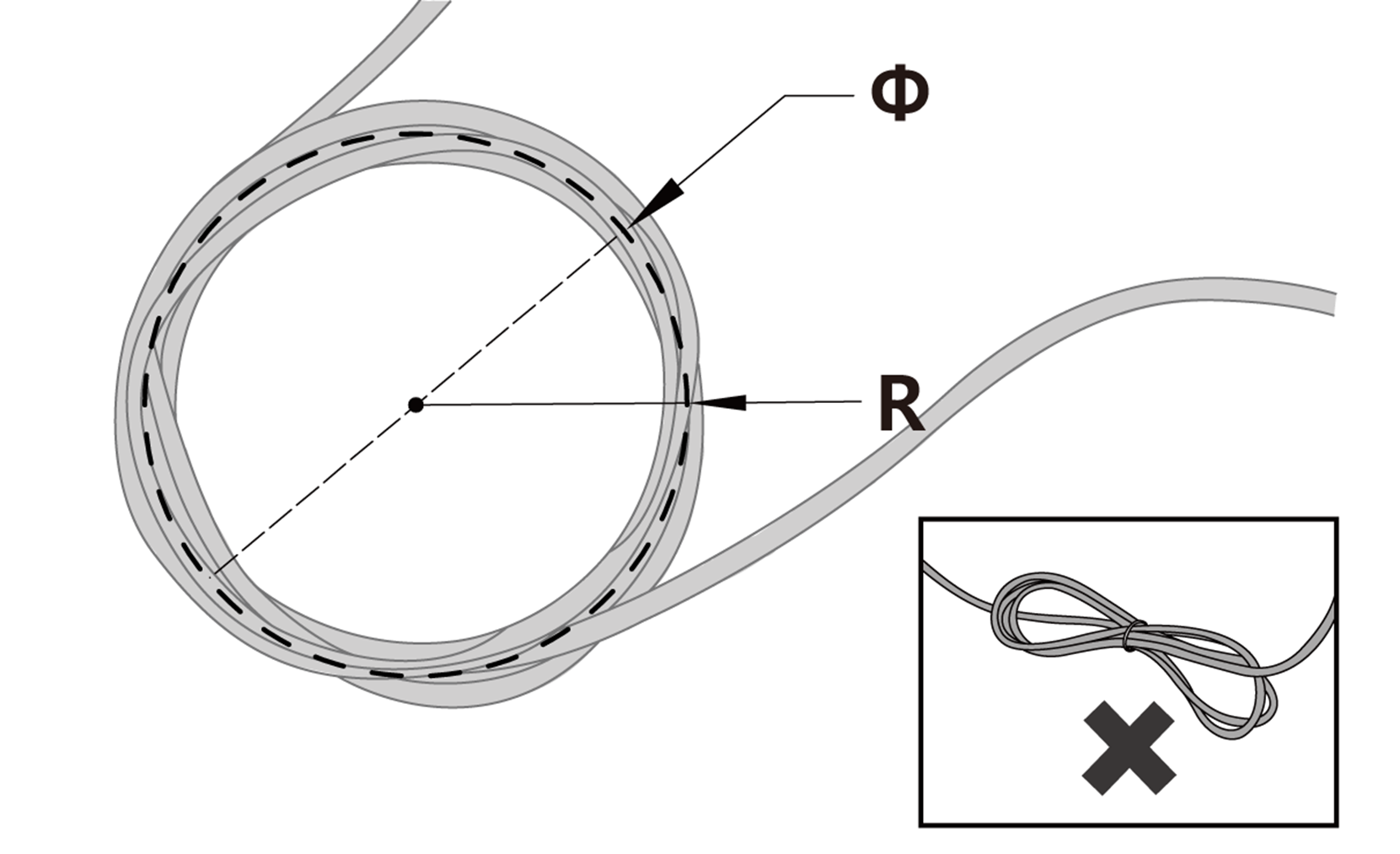
Rozmieszczenie kabli
Zadbać o to, aby promienie krzywizny kabli były większe od minimalnego. Minimalne promienie krzywizny dla poszczególnych kabli:
|
Kabel |
Minimalny promień krzywizny (R) |
|
Teach Pendant cable |
120 mm |
|
Manipulator cables |
120 mm |
|
Smart Pendant cable |
100 mm |
|
Emergency stop button cable |
100 mm |
-
Zapewnić promień krzywizny każdego kabla łączącego programator ręczny większy od minimalnego (120 mm).
-
Jeśli promień krzywizny jest mniejszy niż minimalny promień krzywizny (120 mm), może dojść do rozłączenia kabla lub uszkodzenia urządzenia.
-
W środowisku poddanym działaniu zakłóceń generowanych przez fale elektromagnetyczne zainstalować odpowiednie kable i użyć zabezpieczeń koniecznych do zapewnienia poprawnego działania.
Podłączanie zasilania sterownika
Włożyć kabel zasilający do odpowiedniego gniazdka na sterowniku i docisnąć aż do usłyszenia wyraźnego kliknięcia. Zapobiegnie to poluzowaniu się kabla.
-
Po podłączeniu kabla zasilającego upewnić się, że robot jest prawidłowo uziemiony (połączony z masą elektryczną). Wykonać połączenie wszystkich urządzeń w systemie ze zbiorczym uziomem za pomocą nieużywanych śrub oznaczonych symbolem uziemienia znajdujących się wewnątrz sterownika. Przewód masy musi spełniać wartość znamionową maksymalnego natężenia prądu systemu.
-
Zabezpieczyć wejście zasilania sterownika za pomocą odpowiedniego urządzenia, np. wyłącznika automatycznego.
-
Nie zmieniać ani nie przedłużać przewodu manipulatora. Może to spowodować pożar lub awarię sterownika.
-
Przed zasileniem sterownika należy się upewnić, że wszystkie kable są podłączone prawidłowo. Należy zawsze stosować oryginalny kabel dołączony do produktu.
-
Przy podłączaniu napięcia wejściowego należy pamiętać o zachowaniu poprawnej polaryzacji.
-
Podczas konfigurowania systemu zalecamy zainstalowanie wyłącznika zasilania umożliwiającego równoczesne odłączenie zasilania od wszystkich urządzeń w systemie.
-
W przypadku korzystania ze sterownika zasilanego prądem stałym przemieszczenia robota mogą być ograniczone w zależności od obciążenia i ruchu.
-
Jeśli napięcie wejściowe wynosi nie więcej niż 48 V, przemieszczenia robota mogą być ograniczone w zależności od obciążenia i ruchu.
-
Źródło zasilania musi spełniać minimalne wymagania w zakresie uziemienia i bezpieczników automatycznych. Specyfikacja elektryczna:
|
Parametr |
Specyfikacja |
|
Input Voltage |
22–60 VDC |
|
Rated Input Current |
30 A |