Aby robot wykonał ruch na bazie współrzędnych globalnych, należy:
-
Wybrać kartę Task na ekranie Jog.
-
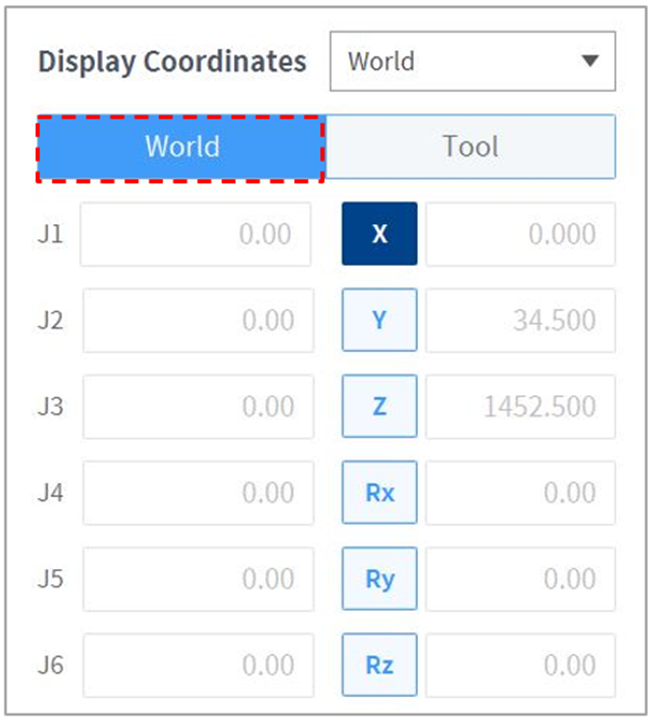
Wybrać współrzędne wyświetlania do użycia jako współrzędne globalne i wybrać World jako punkt odniesienia współrzędnych zadania.
-
Wybrać World Coordinates (Współrzędne globalne), aby wykonać ruch.
-
Nacisnąć i przytrzymać przycisk kierunku(

