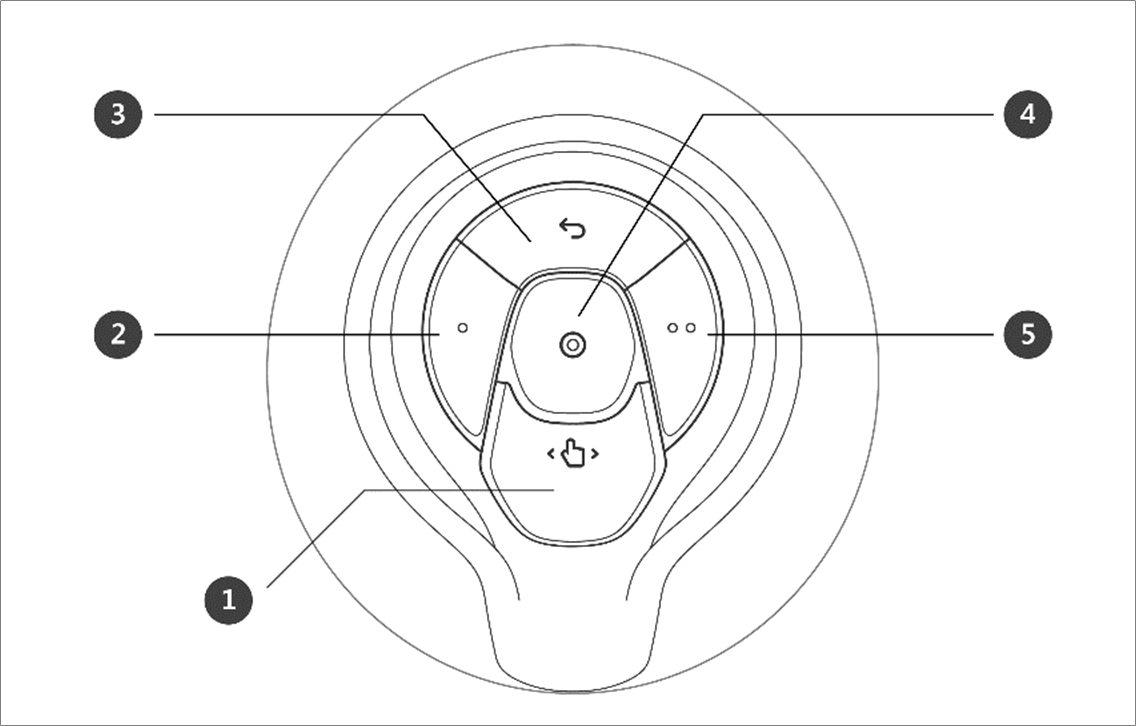
Użytkownik może zmieniać pozycję robota, przytrzymując przycisk prowadzenia ręcznego lub przycisk użytkownika na kokpicie.
|
No. |
Element |
Opis |
|---|---|---|
|
1 |
Hand-Guiding Button |
Przycisk służy do regulacji lub zmiany pozycji robota. |
|
2,5 |
Przycisku ustawień użytkownika (ruch ograniczony) |
Za pomocą tego przycisku można zmieniać pozycję robota, podając pozycję zgodnie ze stanem blokady odpowiadającej trybowi.


Zobacz „(2.12.2-pl_PL) Ustawienia kokpitu", aby uzyskać więcej informacji na temat tych ustawień. |
|
3 |
Cancel Button |
Usuwa ostatnio zapisaną pozycję. |
|
4 |
Save Pose Button |
Zapisuje bieżącą pozycję robota. Aby uzyskać więcej informacji, zobacz „(2.12.2-pl_PL) Ustawianie punktu roboczego polecenia umiejętności za pomocą przycisków kokpitu" |
Ostrożność
-
W modelach serii A bez FTS (A0509, A0912) nie można używać przycisku ustawień użytkownika (ruch ograniczony).
-
Modele serii A z systemem FTS (A0509S, A0912S) umożliwiają korzystanie z przycisku ustawień użytkownika (ruch ograniczony).
-
Ruch ustalony opiera się na FTS przymocowanym do końcówki robota; dlatego konieczne jest przymocowanie narzędzia i uchwycenie go przez robota podczas ruchu. Poruszanie robotem podczas przytrzymywania korpusu może nie wywołać reakcji robota.
-
Szczegółowe informacje na temat ograniczeń funkcjonalnych poszczególnych serii robotów można znaleźć w punkcie „(2.12.2-pl_PL) Ograniczenia funkcjonalne dotyczące każdej serii robota”