Opcjonalnie Normalny 20 min
Próbka ta jest tworzona w aplikacji Task Writer (Writer zadań). Próbkę tę można spróbować prawie w ten sam sposób w narzędziu Task Builder.
PRZESTROGA
-
Przed próbą pobrania próbki należy przeczytać i postępować zgodnie (2.12-pl_PL) Środki ostrożności dotyczące użytkowaniaz instrukcjami . Aby uzyskać więcej informacji, patrz (2.12-pl_PL) CZĘŚĆ 1. Podręcznik bezpieczeństwa.
Uwaga
-
Jeśli podczas włączania lub wyłączania kontroli zgodności występuje zewnętrzny moment obrotowy powyżej progu, robot zatrzymuje program z powodu błędu JTS (Joint Torque Sensor).
Threshold of JTS error (Nm)
Model
J1
J2
J3
J4
J5
J6
A0509
15
15
15
15
15
15
A0912
18
18
15
15
15
15
-
Zmiana sztywnosc mozna zaciagac bez wzgl du na zewnętrzny rozmiar momentu obrotowego.
-
Podczas kontroli zgodności nie można wykonywać wspólnych ruchów, takich jak polecenie MoveJ.
-
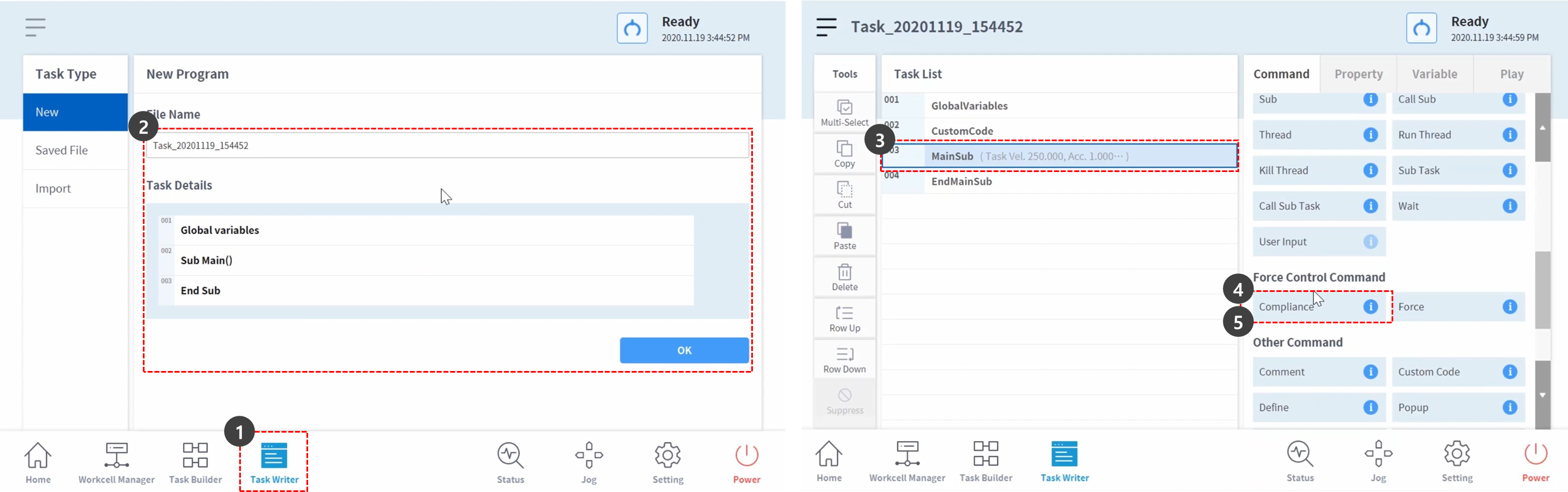
Z dolnego menu wybierz opcję Task Writer (Writer zadań).
-
Wprowadź nazwę zadania i naciśnij przycisk OK.
-
Wybierz polecenie MainSue z trzeciego wiersza listy zadań. Nowe polecenie zostanie dodane do następnego wiersza wybranego wiersza.
-
Dodaj polecenie zgodności. To polecenie jest planowane do użycia w celu włączenia kontroli zgodności.
-
Dodaj kolejną kontrolę zgodności. To polecenie jest planowane do użycia w celu wyłączenia kontroli zgodności.
-
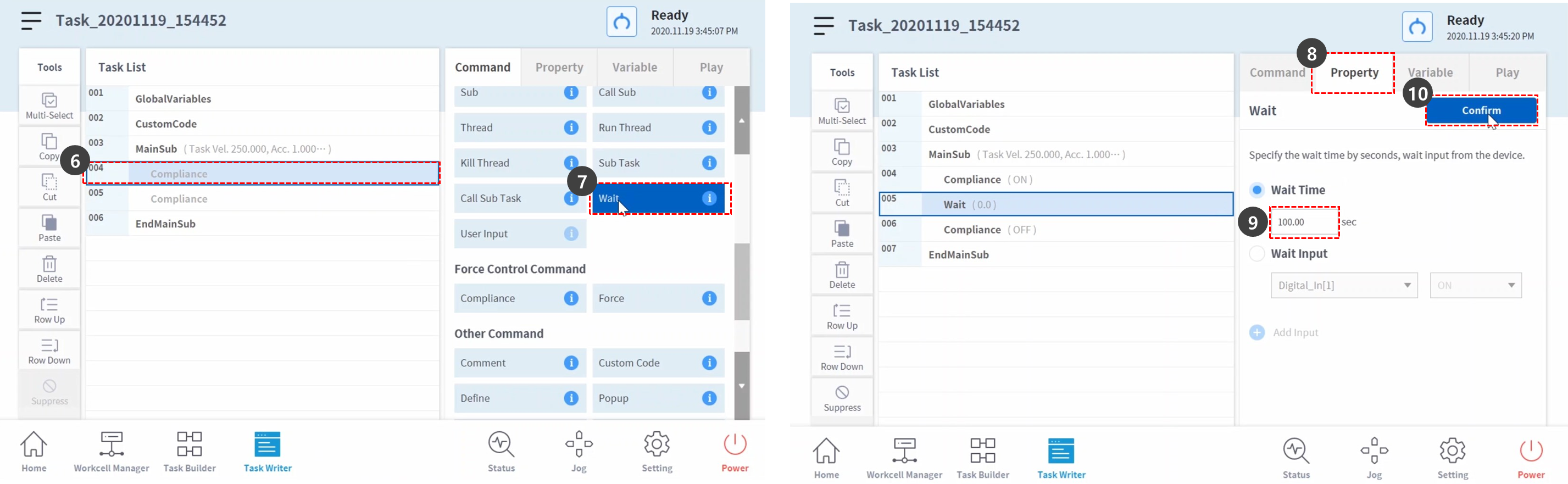
Wybierz polecenie zgodności w czwartym wierszu. Nowe polecenie zostanie dodane do następnego wiersza wybranego wiersza.
-
Dodaj polecenie Czekaj.
-
Wybrać kartę właściwość.
-
Ustaw czas oczekiwania w następujący sposób:
-
Czas oczekiwania: 100 sek
-
-
Nacisnąć przycisk zatwierdzania.
-
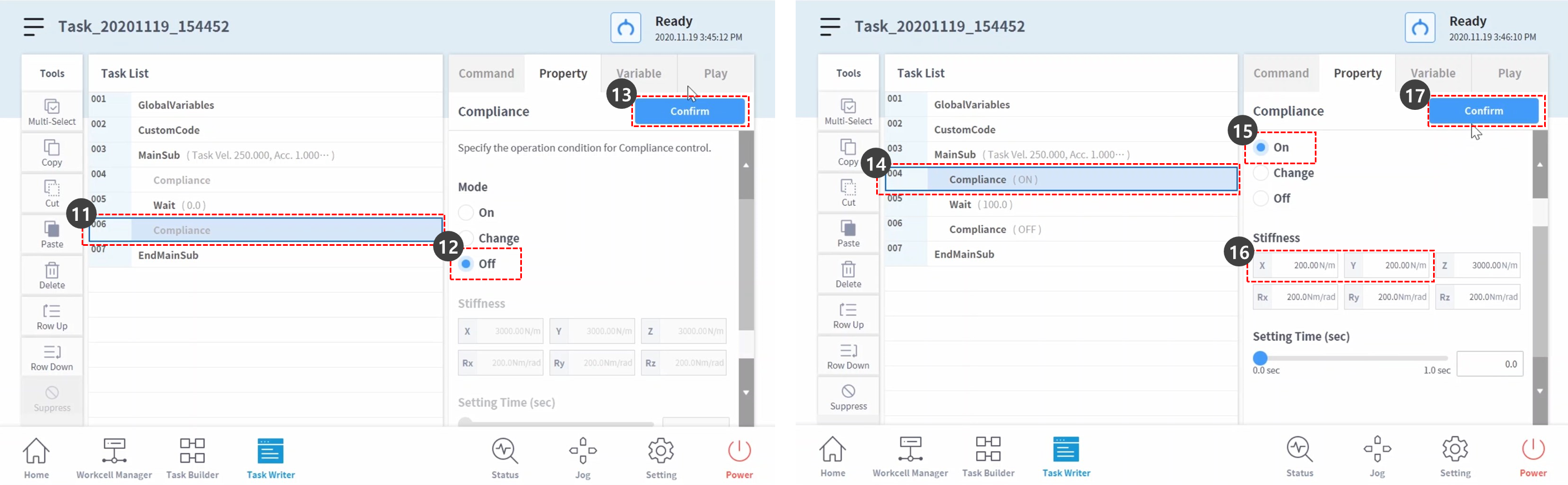
W szóstym wierszu wybierz polecenie zgodności.
-
Ustawić tryb we właściwości jako: Tryb wyłączony wyłącza kontrolę zgodności.
-
Tryb: Wył
-
-
Nacisnąć przycisk zatwierdzania.
-
Wybierz polecenie zgodności w czwartym wierszu.
-
Ustawić Tryb we właściwości jako: Włączenie trybu powoduje włączenie kontroli zgodności.
-
Tryb: WŁ
-
-
Ustawić Styczność w następujący sposób: Zmniejsz sztywność kierunku X i Y, aby uzyskać bardziej miękkie reakcje w kierunkach X i Y.
-
X: 200 N/m.
-
Y: 200 N/m.
-
Z: 3000 N/m (domyślnie)
-
Rx, ry, Rz: 200 Nm/rad (domyślnie)
-
-
Nacisnąć przycisk zatwierdzania.
-
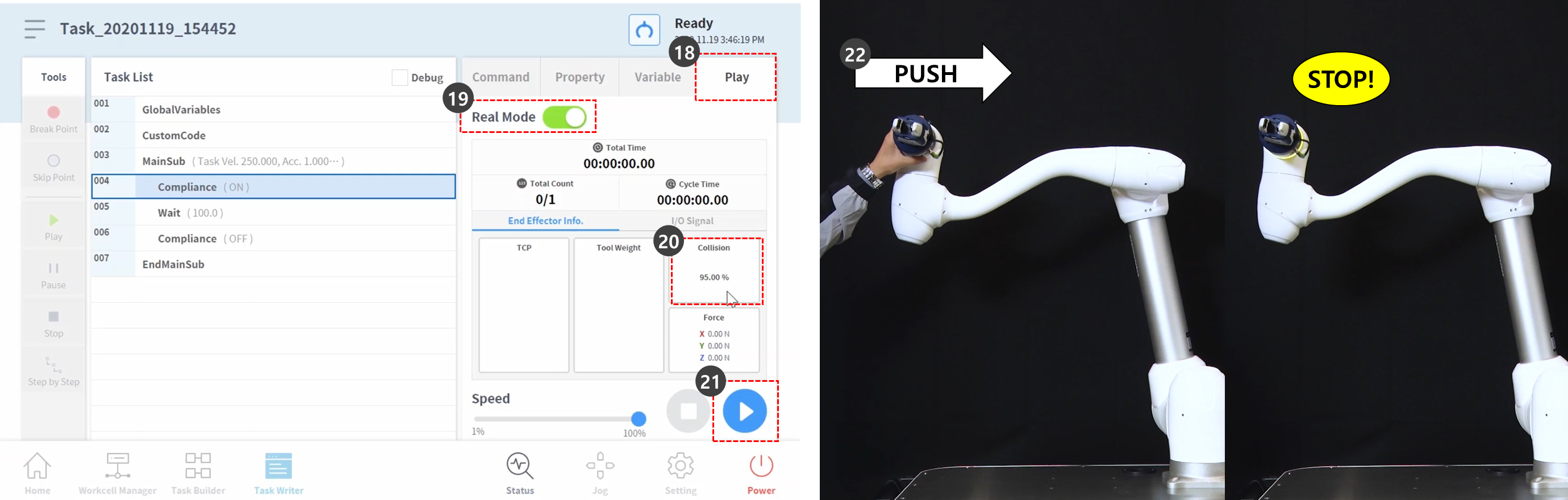
Wybierz kartę Odtwórz.
-
Włącz przycisk przełączania trybu Real Mode.
-
Gdy przycisk przełączania zostanie włączony, przycisk zaświeci się na zielono.
-
-
Próbka ta celowo aktywuje blokadę bezpieczeństwa, aby wyjaśnić przyczynę obniżenia czułości kolizji podczas kontroli zgodności. Czułość kolizyjna tej próbki wynosi 95%. W przypadku tak wysokiej czułości na kolizję, robot reaguje bardzo rozczucie na kolizję.
-
W przypadku kolizji robot jest zatrzymywany przez ogranicznik bezpieczeństwa.
-
-
Naciśnij przycisk odtwarzania.
-
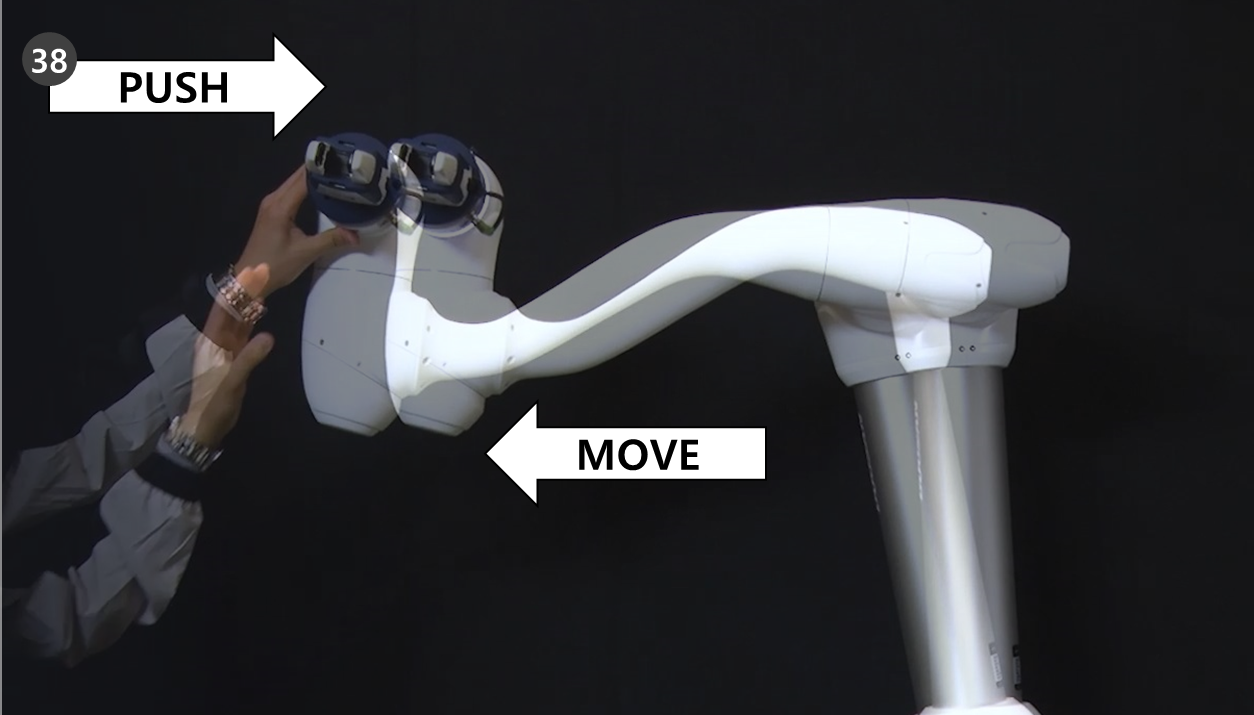
Przytrzymać koniec robota i powoli popchnąć go w kierunku korpusu robota. Robot zatrzymuje się z powodu błędu kolizji. Podczas zatrzymania bezpieczeństwa w wyniku kolizji dioda LED robota świeci na żółto.
-
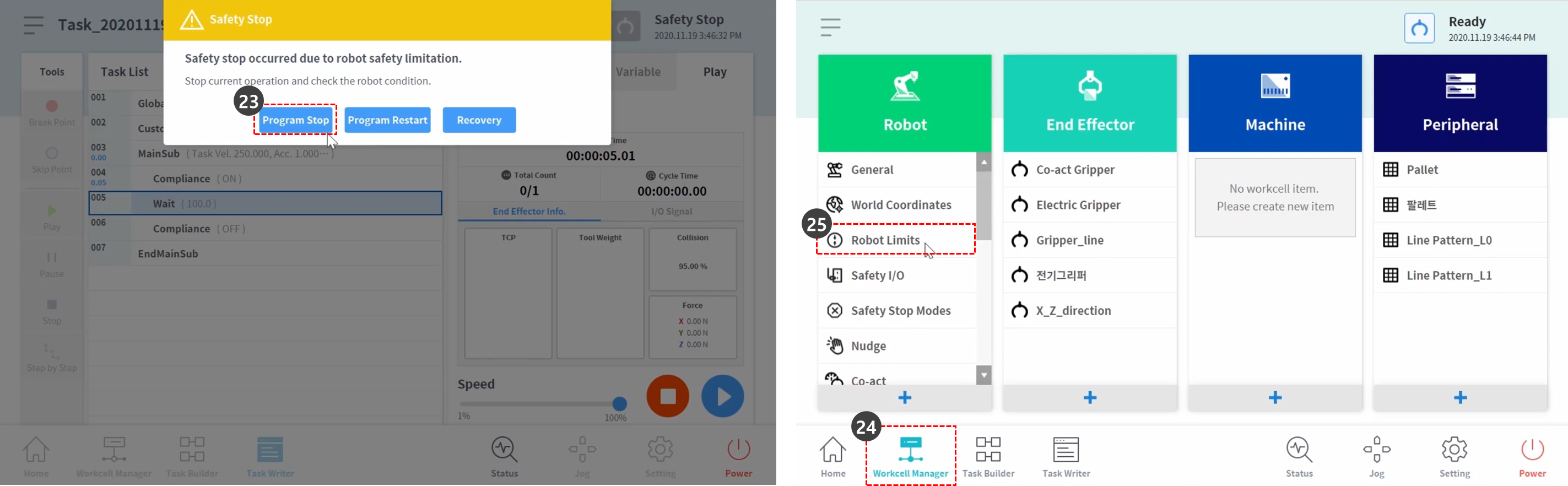
Nacisnąć przycisk zatrzymania programu w żółtym oknie ostrzegawczym zatrzymania awaryjnego na ekranie. Program zadań w toku jest zatrzymany.
-
Z dolnego menu wybierz Menedżer komórek roboczych.
-
Wybierz kolejno Robot > limity robota.
-
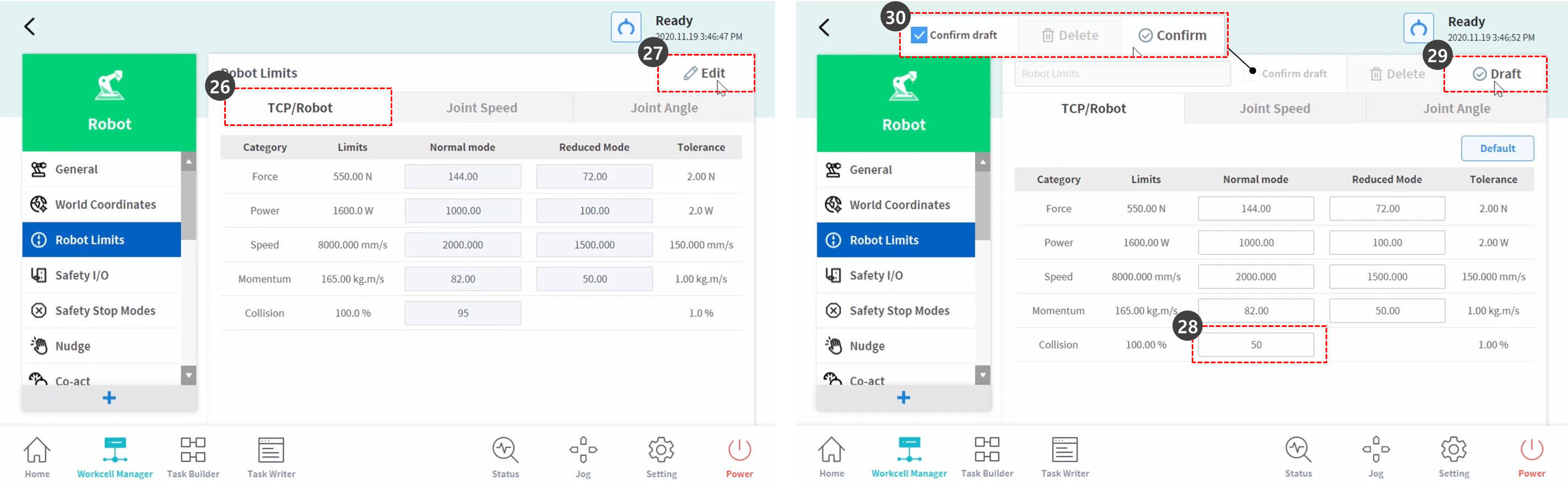
Wybierz kartę TCP/Robot.
-
Naciśnij przycisk Edytuj.
-
Ustaw czułość kolizji w następujący sposób:
-
Tryb normalny: 50 %
-
-
Naciśnij przycisk Draft.
-
Zaznaczyć pole wyboru Potwierdź pochylenie i nacisnąć przycisk Potwierdź.
-
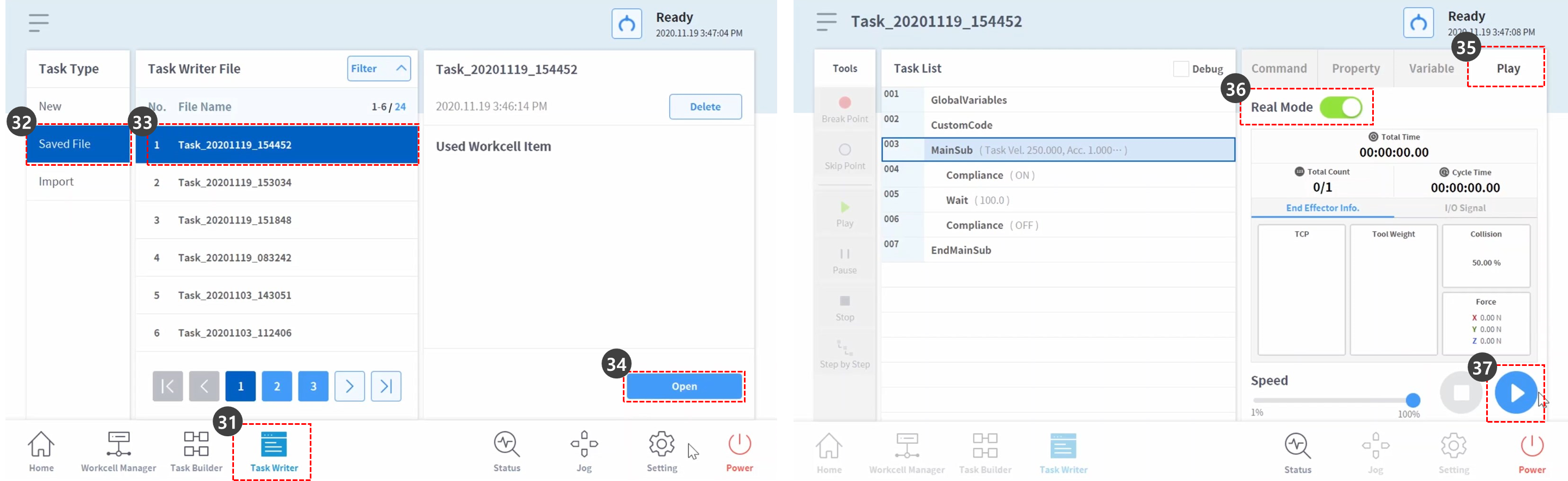
Z dolnego menu wybierz opcję Task Writer (Writer zadań).
-
Wybierz zapisany plik z lewej strony ekranu.
-
Przed wybraniem opcji sprawdź, czy nazwa pierwszego pliku zadania jest nazwą zadania w kroku 2. Ostatnio zapisane zadanie znajduje się na górze listy plików programu Task Writer.
-
Naciśnij przycisk Otwórz.
-
Wybierz kartę Odtwórz.
-
Włącz przycisk przełączania trybu Real Mode.
-
Naciśnij przycisk odtwarzania.
-
Przytrzymać koniec robota i powoli popchnąć go w kierunku korpusu robota. Robot porusza się z powodu siły pchającej i powraca do pierwotnej pozycji.