Opcjonalnie Normalny 20 min
Próbka ta jest tworzona w Kreatorze zadań. Aplikacja Task Writer nie obsługuje funkcji umiejętności.
PRZESTROGA
-
Przed próbą pobrania próbki należy przeczytać i postępować zgodnie (2.12-pl_PL) Środki ostrożności dotyczące użytkowaniaz instrukcjami . Aby uzyskać więcej informacji, patrz (2.12-pl_PL) CZĘŚĆ 1. Podręcznik bezpieczeństwa.
-
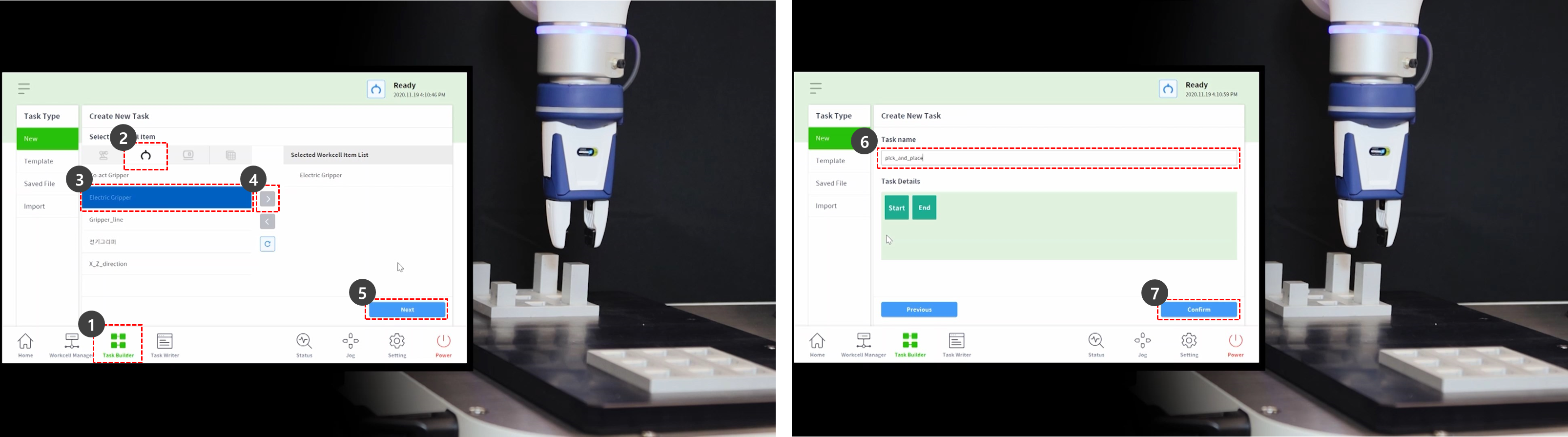
Wybrać generator zadań z dolnego menu.
-
Wybrać ikonę Wybierz element komórki roboczej > chwytak.
-
Wybrać chwytak zarejestrowany jako element komórki roboczej. Nie można spróbować tej próbki, jeśli nie zarejestrowano chwytaka jako elementu komórki roboczej.
-
Naciśnij przycisk >, aby zarejestrować element komórki roboczej jako wybrany element komórki roboczej.
-
Naciśnij przycisk Dalej.
-
Wprowadź nazwę zadania.
-
Nacisnąć Potwierdź.
-
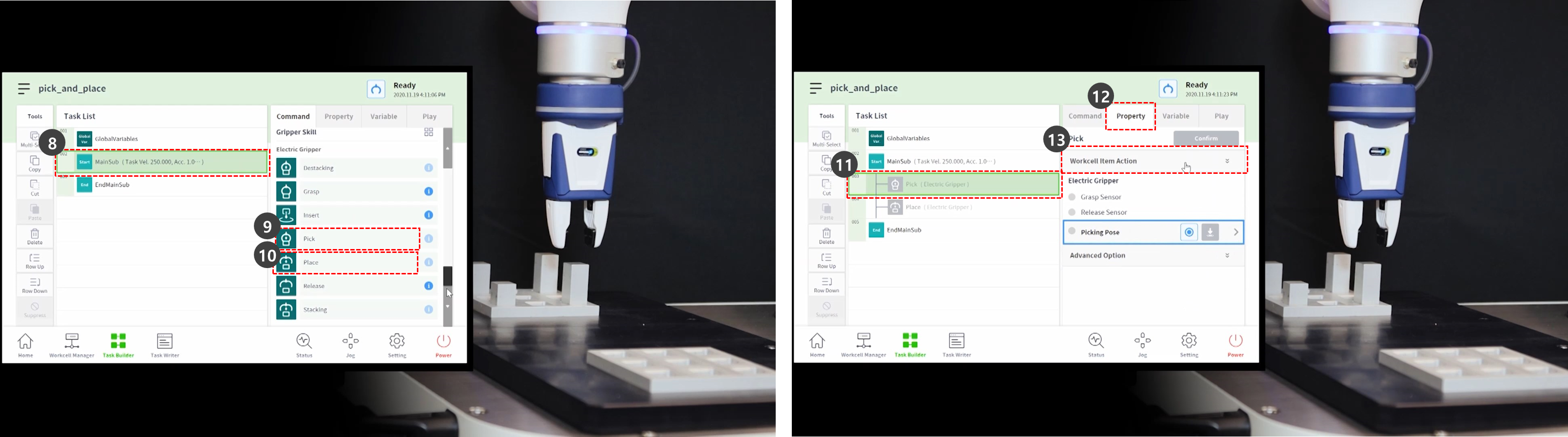
Wybierz polecenie MainSue z drugiego wiersza listy zadań. Nowe polecenie zostanie dodane do następnego wiersza wybranego wiersza.
-
Dodaj polecenie Wybierz umiejętność.
-
Dodaj polecenie zręcznościowe miejsce.
-
Wybierz polecenie Wybierz z trzeciego wiersza listy zadań.
-
Wybrać kartę właściwość.
-
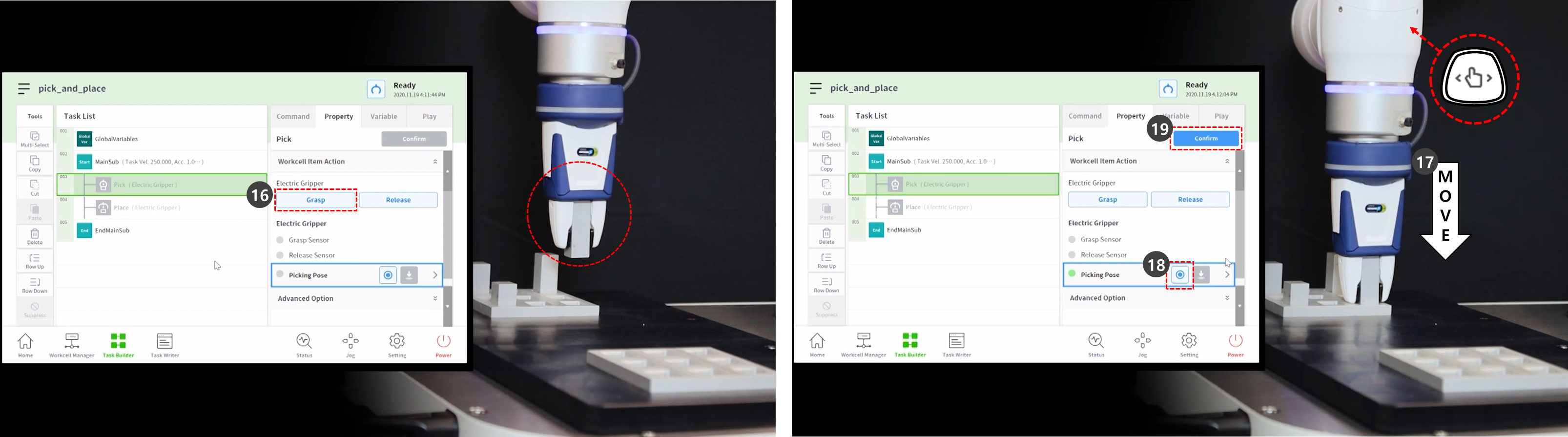
Naciśnij przycisk działanie elementu komórki roboczej, aby rozwinąć menu. Jeśli wybrano element komórki roboczej chwytaka, działanie chwytaka można przetestować podczas działania elementu komórki roboczej.
-
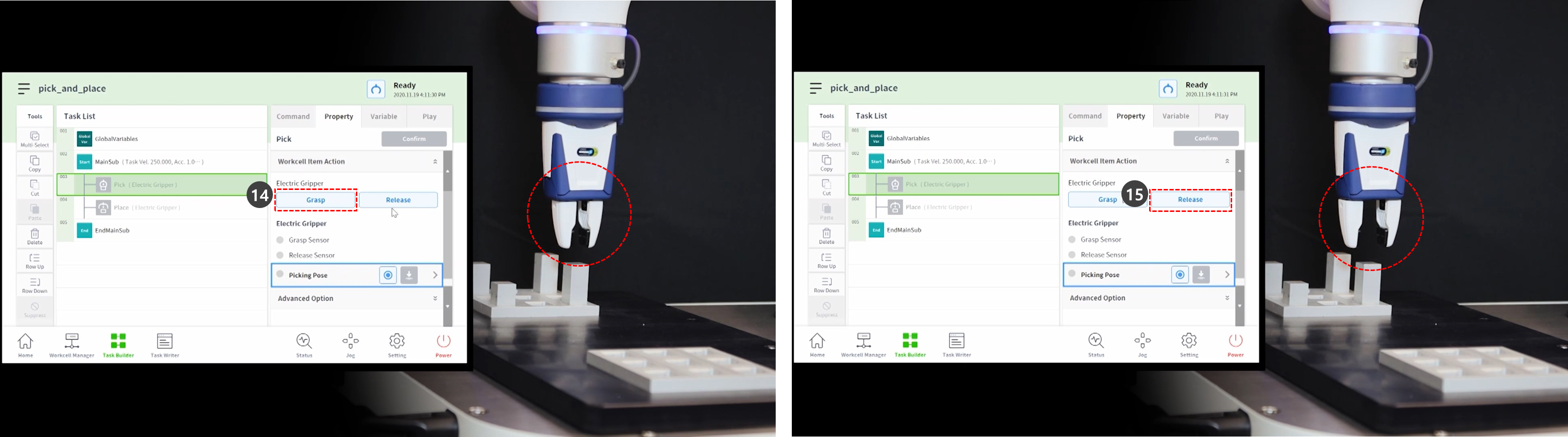
Aby przetestować chwytak, naciśnij przycisk chwytu i wykonaj ruch chwytu.
-
Aby przetestować chwytak, należy nacisnąć przycisk zwolnienia i wykonać ruch zwolnienia.
-
W przypadku lekkich przedmiotów obrabianych, umieścić przedmiot w chwytaku i nacisnąć przycisk chwytu, aby robot przytrzymywać przedmiot obrabiany. Wykonywanie nauczania podczas chwytaka przytrzymującego przedmiot obrabiany może pomóc w ustaleniu dokładnego położenia.
-
Jednakże posiadanie przez robota przedmiotu obrabianego podczas nauczania nie jest obowiązkowe, ale przykładem.
-
W przypadku ciężkich przedmiotów obrabianych mogą wystąpić niebezpieczne sytuacje, ponieważ chwytak może stracić obrabiany przedmiot.
-
W przypadku ciężkich przedmiotów obrabianych, masa narzędzia w ustawieniach narzędzi musi zawierać masę narzędzia i masę obrabianego przedmiotu.
-
-
Użyj bezpośredniego nauczania, aby przenieść robota do punktu, w którym ma zostać wykonany odbiór.
-
Nacisnąć i przytrzymać przycisk prowadzenia ręcznego w kokpicie, aby przesunąć robota.
-
-
Nacisnąć przycisk Get Pose (Pobierz położenie) na pozycji wybierania.
-
Nacisnąć przycisk zatwierdzania.
-
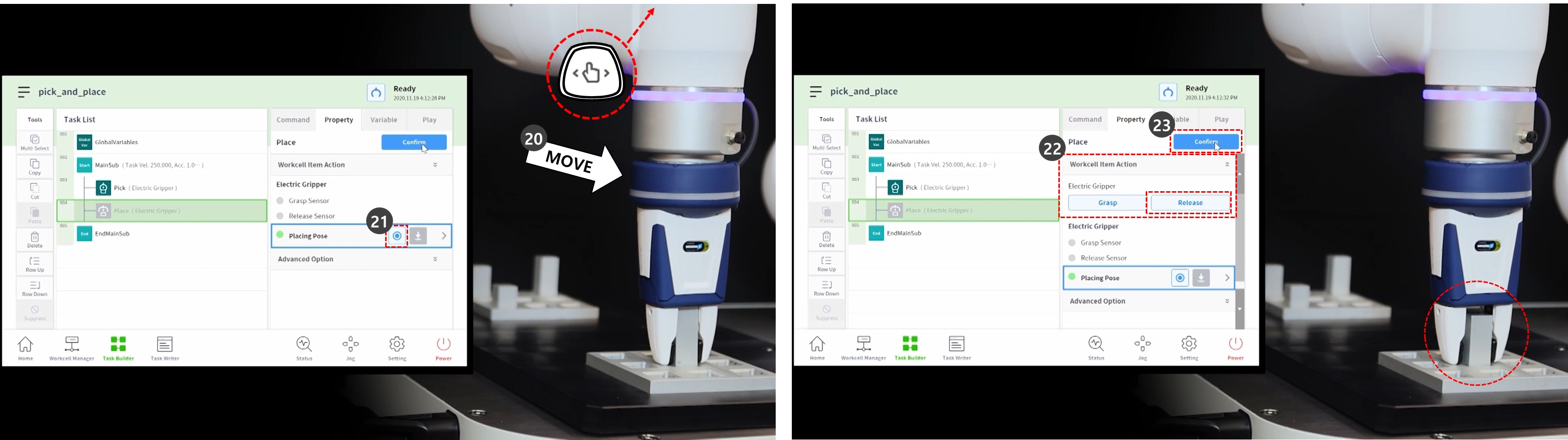
Użyj bezpośredniego nauczania, aby przenieść robota do punktu, w którym zostanie wykonane miejsce.
-
Naciśnij przycisk Get Pose (Pobierz położenie) na pozycji wprowadzania.
-
Aby zwolnić obrabiany przedmiot z chwytaka, należy nacisnąć przycisk Zwolnij.
-
Nacisnąć przycisk zatwierdzania.
-
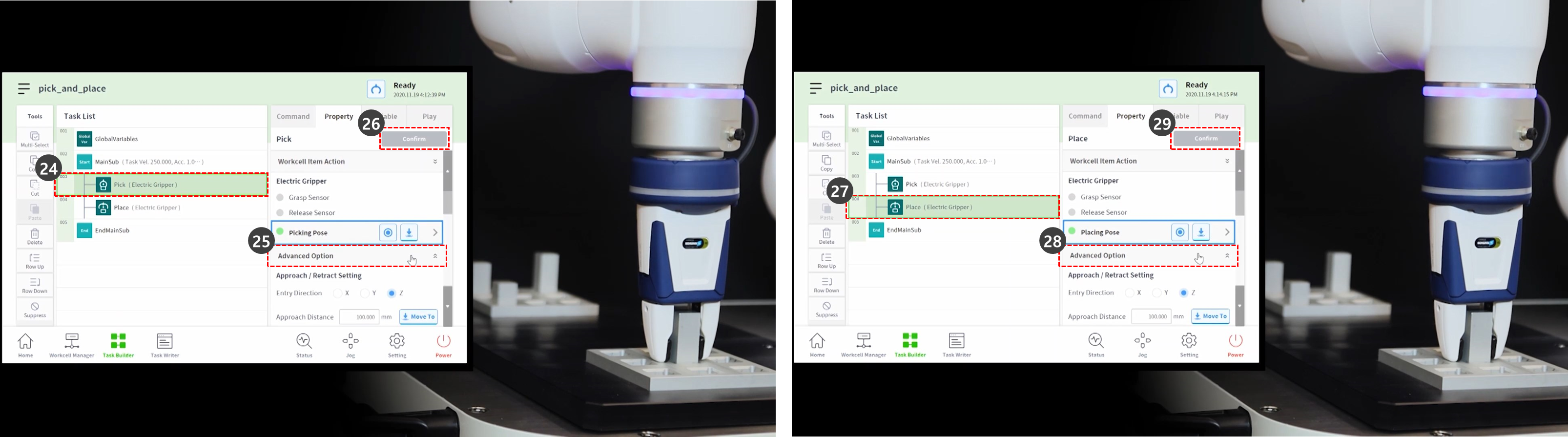
Aby ustawić szczegółowe ustawienia poleceń umiejętności Wybierz i umieść, wybierz polecenie Wybierz w trzecim wierszu listy zadań.
-
Naciśnij opcję Zaawansowane, aby rozwinąć menu i ustawić następujące opcje: Użyj wartości domyślnych dla elementów nieopisanych poniżej.
-
Kierunek wejścia: Oś Z.
-
It ustawia kierunek wprowadzania pozycji pobierania.
-
-
Odległość dosuania: 100 mm
-
It ustawia odległość tuż przed zbliżeniem robota do pozycji pobierania. It zapewnia wystarczającą odległość podejścia.
-
-
Odległość wsuwania: 100 mm
-
It ustawia odległość, po której odkurzacz automatyczny cofa się w ustawionym kierunku z pozycji pobierania. Zapewnia wystarczającą odległość wsuwania.
-
-
Prędkość dosuwu: 100 mm/s.
-
It ustawia prędkość dosuwu niższą niż wartość domyślna, gdy robot zbliża się do obiektu.
-
-
Kontrola zgodności: Włączony (zielony)
-
Styk czujnikowy: Włączony (zielony)
-
Funkcja It umożliwia kontrolę zgodności i wykrywanie kontaktów.
-
Siła kontaktowa: 10N
-
Tolerancja kontaktu: 10 mm
-
Siła: 15N
-
Odsunięcie zarysowania: 2 mm
-
-
Zwolnić chwytak przed pobraniem: Włączony (zielony)
-
It ustawia chwytak w stanie Zwolnij przed zbliżeniem się do miejsca pobierania.
-
-
Waga narzędzia: Brak
-
Jeśli obrabiany przedmiot nie jest lekki, należy zsumować masę obrabianego przedmiotu i masę narzędzia, dodać je jako element komórki roboczej masy narzędzia i wybrać.
-
-
-
Nacisnąć przycisk zatwierdzania.
-
Wybierz polecenie Umieść z czwartego wiersza listy zadań.
-
Naciśnij opcję Zaawansowane, aby rozwinąć menu i ustawić następujące opcje: Użyj wartości domyślnych dla elementów nieopisanych poniżej.
-
Kierunek wejścia: Oś Z.
-
Odległość dosuania: 100 mm
-
Odległość wsuwania: 100 mm
-
Prędkość dosuwu: 100 mm/s.
-
Kontrola zgodności: Włączony (zielony)
-
Styk czujnikowy: Włączony (zielony)
-
Funkcja It umożliwia kontrolę zgodności i wykrywanie kontaktów.
-
Siła kontaktowa: 10N
-
Tolerancja kontaktu: 10 mm
-
Siła: 15N
-
-
Waga narzędzia: Brak
-
-
Nacisnąć przycisk zatwierdzania.
-
Użyj bezpośredniego nauczania, aby przenieść robota do punktu, w którym rozpocznie się Pick&Place.
-
Przesunąć przedmiot obrabiany w miejsce pobierania.
-
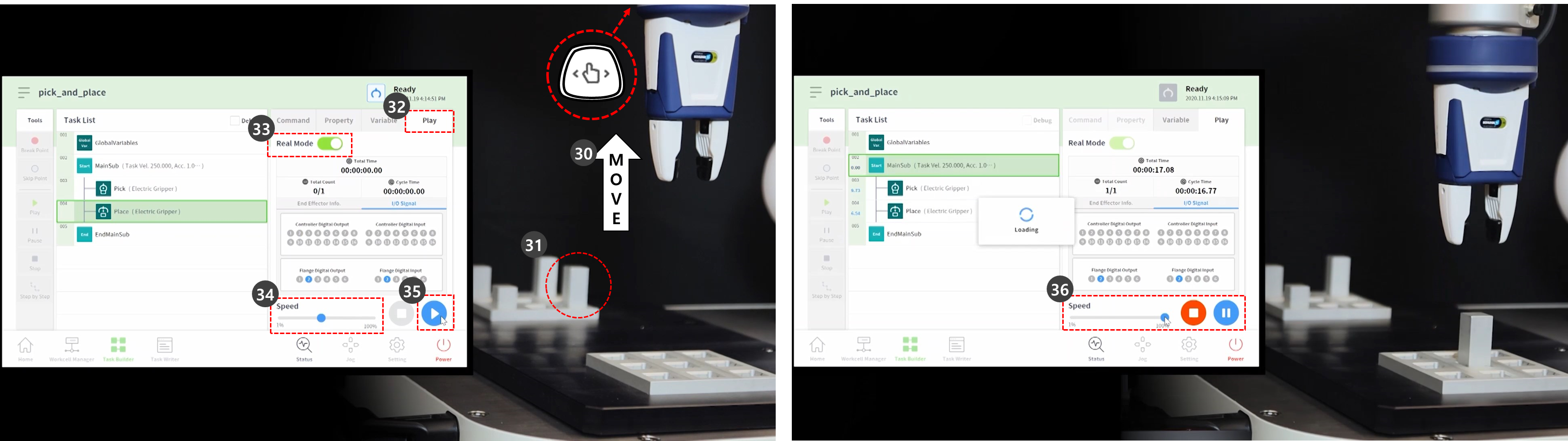
Wybierz kartę Odtwórz.
-
Włącz przycisk przełączania trybu Real Mode.
-
Ustaw suwak prędkości na 10–30%.
-
Ten suwak prędkości dostosowuje ustawioną prędkość wszystkich poleceń do wybranego %.
-
Wykonanie zadania po raz pierwszy po jego utworzeniu przy niskiej prędkości może zapobiec nieoczekiwanemu ryzyku.
-
-
Naciśnij przycisk odtwarzania.
-
Jeśli zadanie zostanie wykonane bez problemów, przywróć domyślną prędkość 100% i przetestuj ponownie.