W tym miejscu można ustawić układ współrzędnych dotyczący obrabianego przedmiotu. Są one określane jako User Coordinates (współrzędne użytkownika) i różnią się od World Coordinates (współrzędnych globalnych). Operator może ustawić pozycję współrzędnych użytkownika za pomocą współrzędnych podstawy lub globalnych; współrzędne użytkownika można wybrać podczas uczenia i ruchu robota w Task Builder i Task Writer. Aby ustawić współrzędne użytkownika, należy dotknąć przycisku 
-
Wprowadzić wymagane wartości ustawień.
-
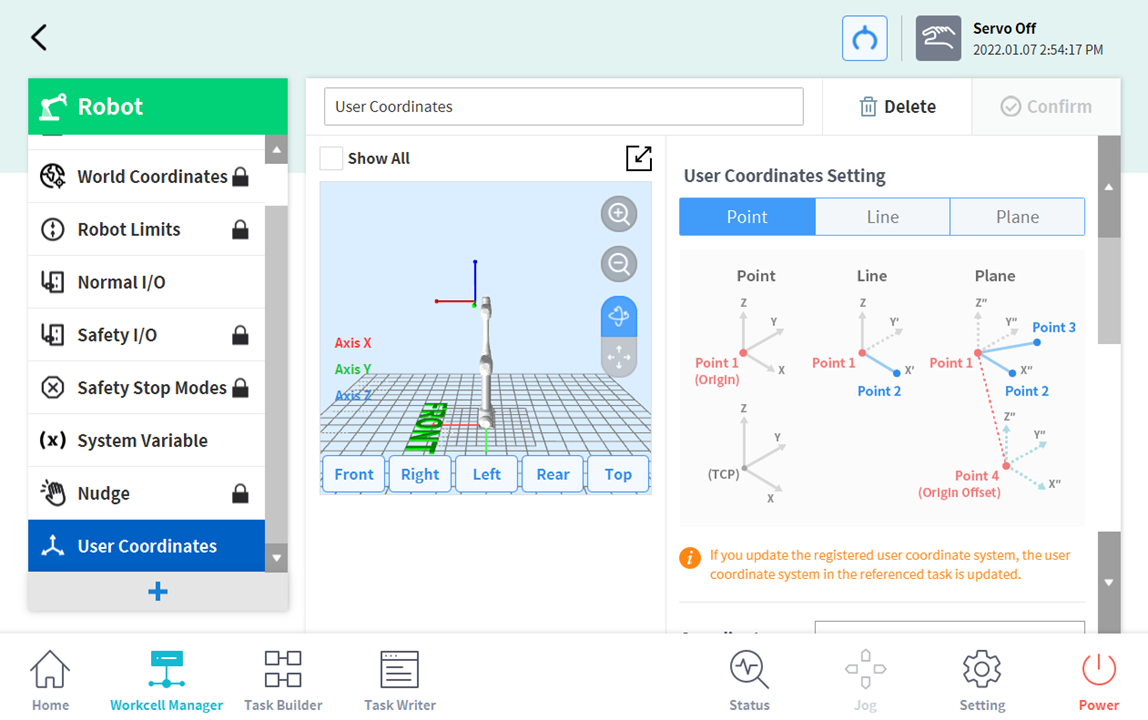
Należy odczytać informacje z ilustracji i ostrzeżenia dotyczące współrzędnych użytkownika.
-
Współrzędne użytkownika można tworzyć na podstawie 1, 2 i 3 punktów.
-
Użytkownik może wczytać współrzędne palety z Advanced Options (Opcji zaawansowanych) i zastosować je do punktów należących do współrzędnych użytkownika.