Rozruch systemu odbywa się po włączeniu zasilania. Po ukończeniu rozruchu na programatorze ręcznym wyświetli się aplikacja systemowa. Zobacz „ Konfiguracja ekranu programu”, aby uzyskać więcej informacji na temat aplikacji systemowej.
W przypadku platformy DART (dla systemu Windows),
-
Uruchom platformę DART zainstalowaną na komputerze stacjonarnym lub laptopie.
-
Poczekaj około 5 minut, aż kontroler robota zakończy ładowanie.
-
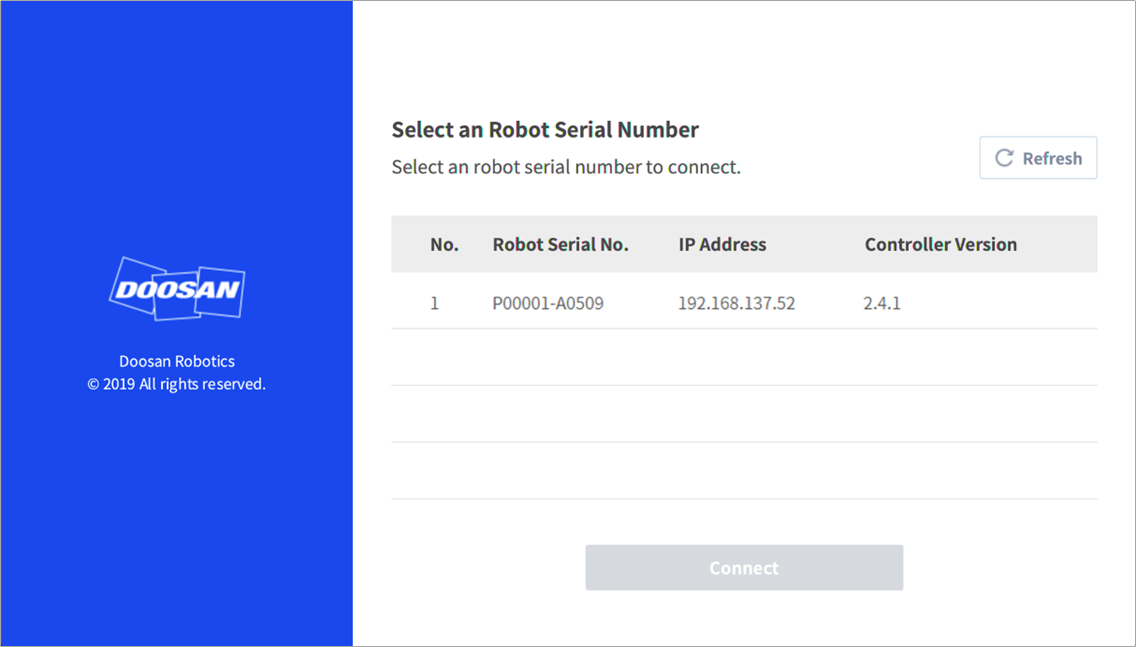
Podczas wyszukiwania adresu IP sprawdź numer seryjny urządzenia podłączonego do sieci.
-
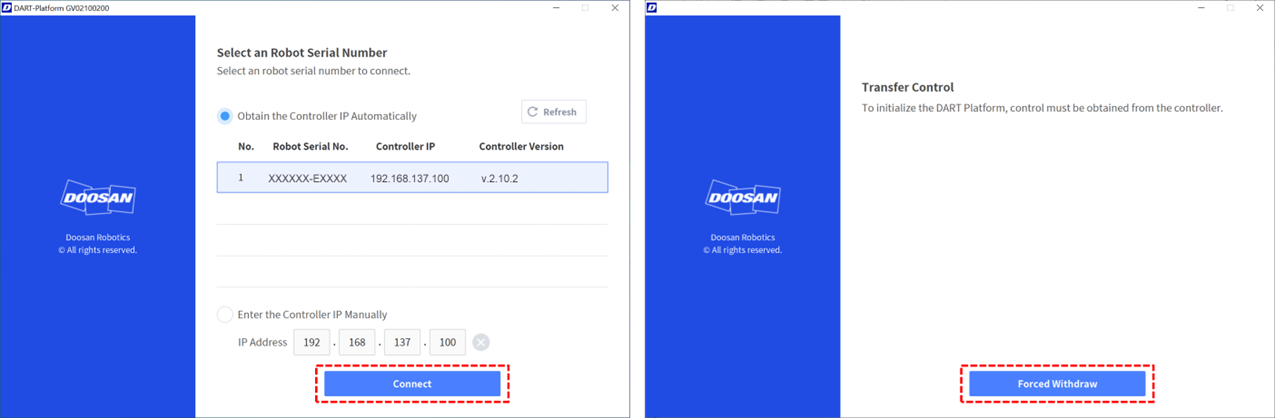
Wybierz robota, którego chcesz połączyć, i kliknij przycisk „Połącz”.
-
Naciśnij przycisk Force Recall, aby przenieść kontrolę.
-
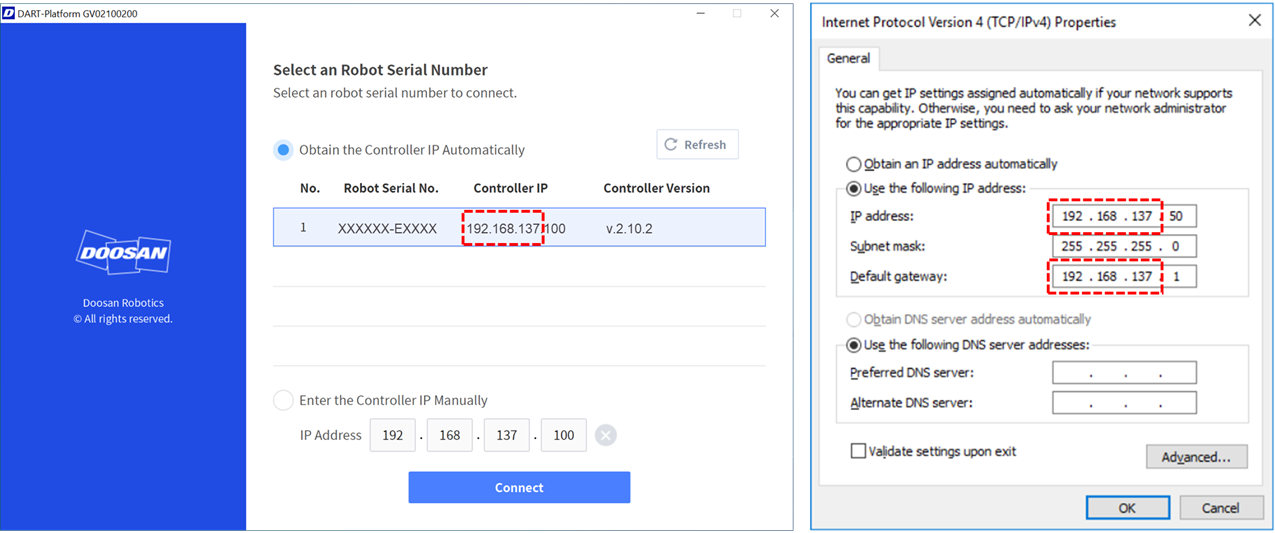
Jeśli nie ma połączenia między kontrolerem a platformą DART, zmień pasmo klasy C adresu IP i domyślnej bramy komputera stacjonarnego lub laptopa z zainstalowaną platformą DART na pasmo klasy C adresu IP kontrolera i spróbuj ponownie.
-
Jeśli adres IP nie zostanie wyszukany, wybierz „Wprowadź adres IP kontrolera ręcznie” i kontynuuj połączenie. Domyślny adres IP kontrolera to 192.168.137.100.
-
Jeśli wymuszone wycofanie elementu sterującego nadal kończy się niepowodzeniem, sprawdź następujące elementy:
-
Zamknij program i uruchom ponownie.
-
Upewnij się, że przycisk(i) zatrzymania awaryjnego nie jest wciśnięty.
-
Jeśli jedna lub więcej par wejść cyfrowych sterownika jest przypisanych do sygnału zatrzymania awaryjnego / zdalnego zatrzymania awaryjnego / STO (aktywny niski) w ustawieniach we/wy bezpieczeństwa, upewnij się, że wszystkie wyznaczone sygnały są dezaktywowane ( Wysoki).
-
Sprawdź, czy kontroler zakończył ładowanie.
-
Sprawdź stan robota. W przypadku Remote Control, Recovery lub Backdrive uruchomienie platformy DART może się nie powieść.
-
-
Servo On: Aby móc zmienić pozycję, serwomechanizm musi być włączony gdy zasilanie jest doprowadzone do przegubów robota, a robot znajduje się w trybie czuwania. Zobacz „ Servo On”, aby uzyskać więcej informacji na temat stanu Servo On.
-
Ustawienia daty i godziny: Data i godzina wyświetlane na programatorze ręcznym oraz komunikaty dziennika zapisane w robocie korzystają z ustawienia daty i godziny systemowej, dlatego datę i czas należy ustawić podczas pierwszego rozruchu. Zobacz „ Ustawienia daty i godziny”, aby uzyskać informacje na temat ustawiania daty i godziny.
-
Aplikacja DART Platform umożliwia sterowanie robotem bez korzystania z programatora ręcznego.
-
W DART Platform jest wyświetlany ekran, na którym jest pokazywany robot podłączony do sieci po wykonaniu rozruchu, dodatkowo na tym ekranie odbywa się proces kontrolowania numeru seryjnego robota i nawiązywania połączenia z robotem.