ユーザー定義の区域を設定するには、、ロボットワークセルで 
-
ワークセル設定画面上段のワークセル名入力画面に、登録しようとするワークセルの名前を入力してください。
-
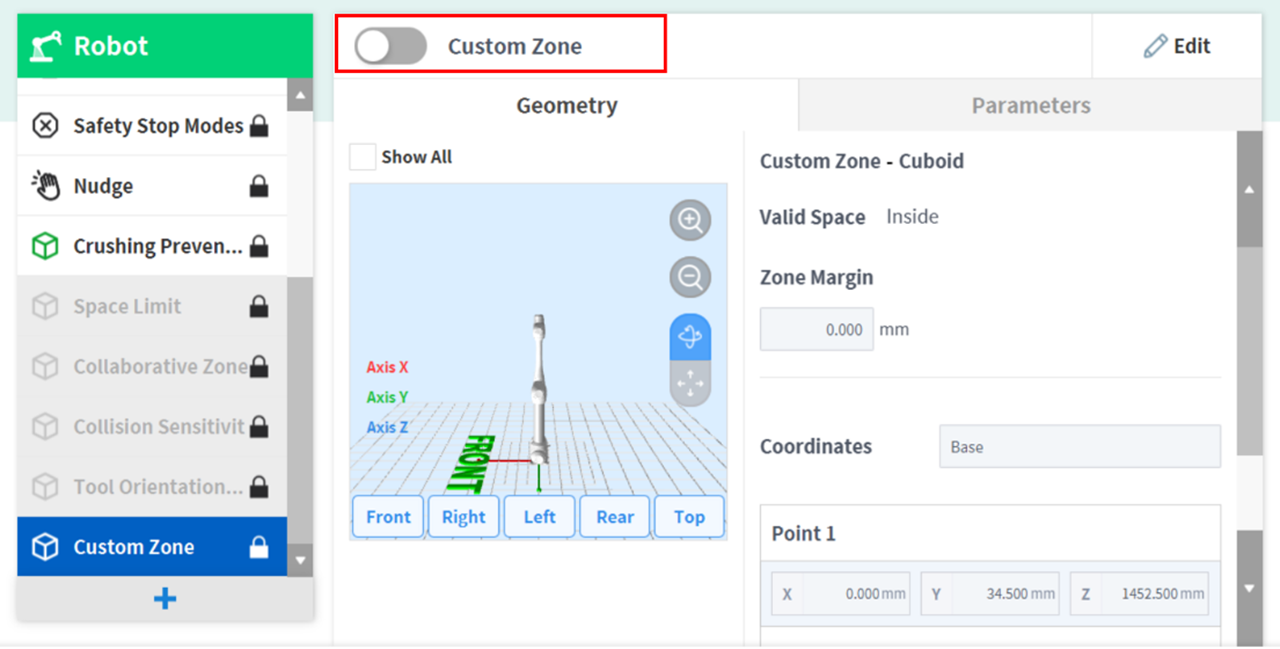
形(Geometry)タブで、区域(Zone)の形に基づくポーズ情報と有効スペース(Valid Space)、区域マージン(Zone Margin)を設定してください。
-
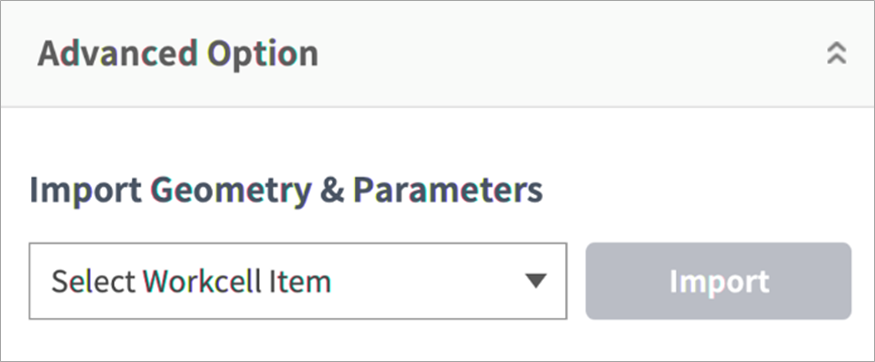
他の領域で設定した形設定をインポートする場合は、高級オプション(Advanced Option)の形とプロパティインポート(Import Geometry & Parameters)で他のワークセルアイテムを選択後、インポート(Import)を押せば、設定した値をインポートできます。
-
パラメータ(Parameters)タブで優先順位オプション(Priority Option)、オーバーライドオプション(Override option)、安全停止モード(Safety Stop Modes)、ツール中心点/ロボット制限値(TCP/Robot Limits)、ジョイント角速度制限値(Joint Speed Limits)、ジョイント角度制限値(Joint Angle Limit)と動的区域有効化(Dynamic Zone Enable)を設定後、臨時保存(Draft)ボタンを押してください。
高優先度ゾーンは、他のゾーンおよびグローバルロボット制限設定よりも優先されます。また、複数の優先度の高いゾーンが重なっている場合、安全機能は最も制限の少ない安全制限を使用します。これらの理由から、安全のために優先度の高いゾーンのサイズはできるだけ小さく指定する必要があります
複数の領域が重なる位置にTCPがある場合、次のようなルールが各安全機能について個別に適用されます。
-
正常モード(Normal Mode)
-
減速モード(Reduce Mode)
-
-
表示されたすべてのパラメータ値が設定しようとする値と一致することを確認後、臨時保存確定(Confirm draft)を選択し、確認(Confirm)を押してください。
-
有効化トグルボタンを押してユーザー定義区域を適用させてください。