O TCPpode ser alinhadocom a peça de trabalho antes de a peça de trabalho ser executada quando está posicionada lado a lado no eixo da base/mundo do robô. Pode definir a sua pose Teching lado a lado para o sistema de coordenadas base/mundopara o ajudar a definir a sua posição de ensino. Se quiser fazer o ensino depois de a sua postura estar fixa, utilize a função de ensino direto fixo ao rosto ou linha com o botão Cockpit.
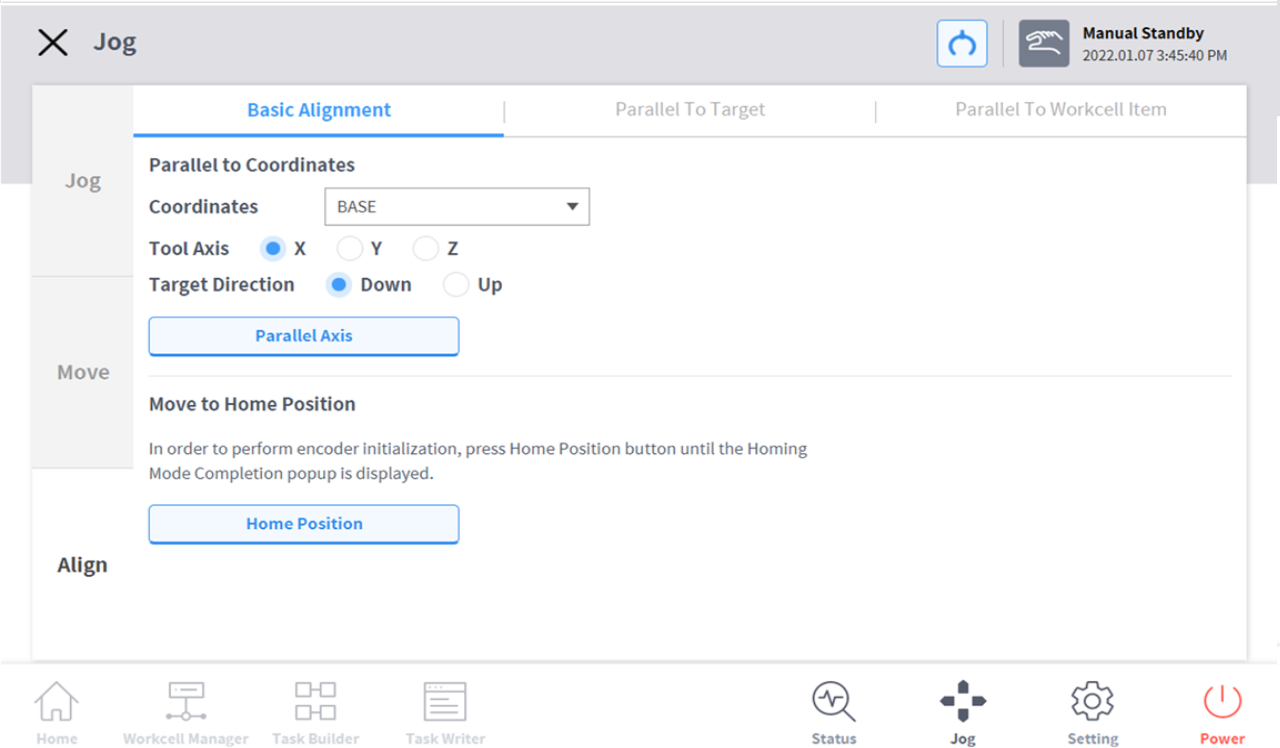
Para alinhar o TCP do robô com o eixo base:
-
Selecione a guia Classificar e a guia Ordenação padrão.
-
Selecione um sistema de coordenadas de referência para alinhar.

-
Selecione o eixo da ferramenta a ser baseadoem.

-
Selecione uma direção de ordenação.

-
Mantenha premido o botão Align Axis(Alinhar eixo) para alinhar o eixo.