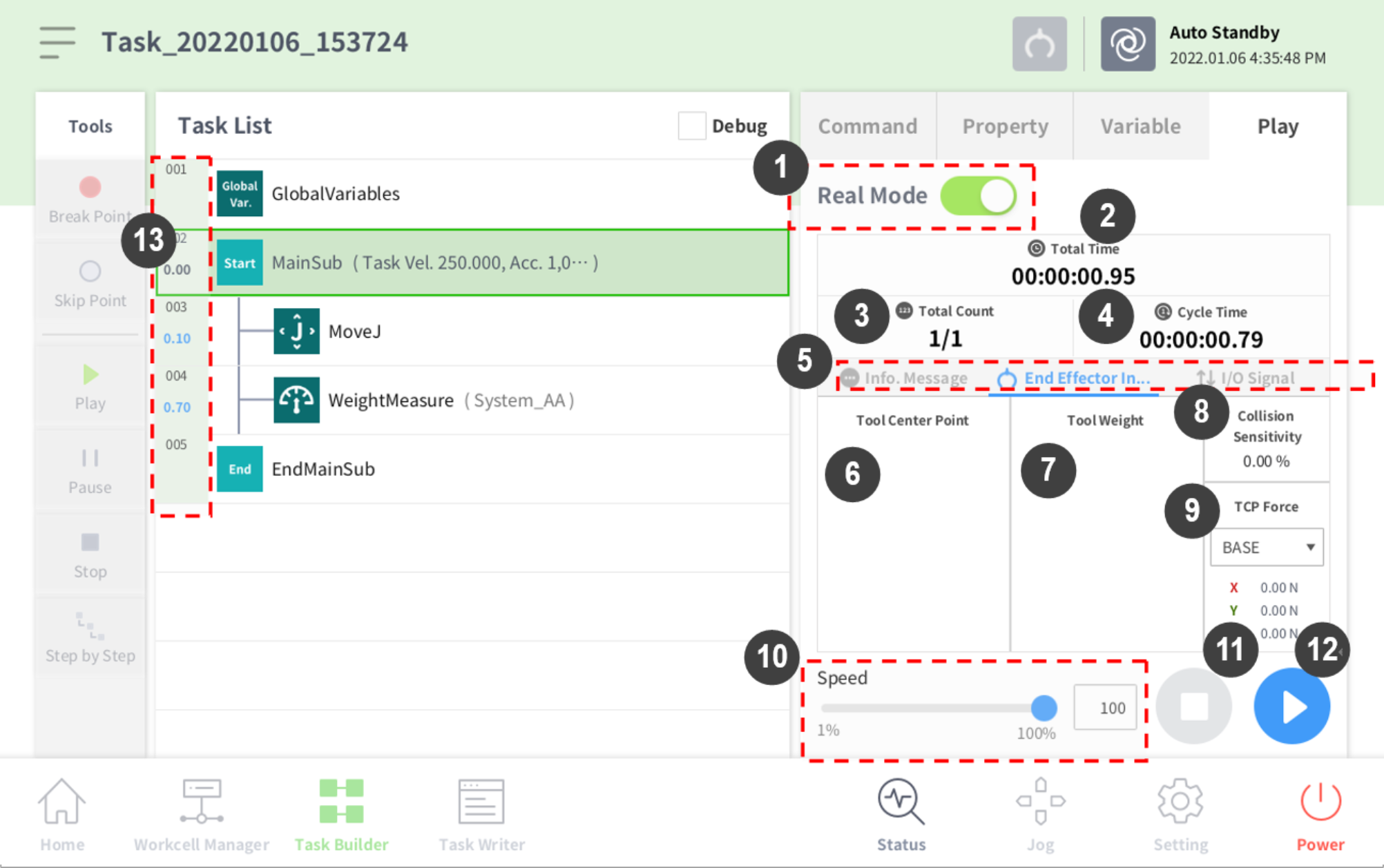
O separador End efetor Information (Informações efetoras finais) no ecrã Physical Mode Play (Reprodução física do modo) do Task Builder está organizado da seguinte forma:
|
Número |
Item |
Descrição |
|
1 |
Modo real |
Alterna o modo de teste de reprodução do robô.
|
|
2 |
Tempo total |
Exibe a quantidade total de tempo desde que a tarefa foi executada. |
|
3 |
Contagem total |
Apresenta o número de vezes que a tarefa foi executada. |
|
4 |
Tempo médio tomado |
Apresenta a quantidade média de tempo que demora a realizar um trabalho na lista de tarefas. |
|
5 |
Separador de transições de informações |
Pode alternar entre o ecrã de mensagens de informação do robot, o ecrã de informações de efeito final e o ecrã de informações de entrada/saída.
|
|
6 |
Área de informações de localização do centro de ferramentas |
Exibe as informações de posição do centro de ferramentas definidas pelo comando Set TCP (Definir TCP) ou pela função de definição de posição e peso do centro de ferramentas da Jog. |
|
7 |
Área de informações sobre o peso da ferramenta |
Apresenta as informações de peso da ferramenta definidas pelo comando Set TCP (Definir TCP) ou pela função de definição de posição e peso do centro da ferramenta da Jog. |
|
8 |
Área de informação de conflito |
Apresenta o valor de sensibilidade de colisão definido para a área de trabalho à qual o robot atual está a entrar. |
|
9 |
Forçar área de informação |
Exibe as informações de força que ocorrem nos sistemas de coordenadas Base, Mundo, Usuário e Referência. O sistema de coordenadas de referência apresenta informações de força com base nas informações do sistema de coordenadas definidas no robô. |
|
10 |
Cursor de velocidade |
Pode definir a velocidade do robot no modo físico ou virtual. |
|
11 |
Botão de paragem |
Pára uma tarefa em execução. |
|
12 |
Botão de alternância Reproduzir/Pausar |
Pode reproduzir ou colocar um trabalho em pausa na lista de tarefas. |
|
13 |
Duração |
Exibe a quantidade de tempo gasto na execução desse comando/especialidade. |

-
Antes de executar a tarefa no modo real, execute-a no modo virtual para verificar se ela funciona conforme pretendido pelo usuário.
-
Recomenda-se que teste o programa do robô atribuindo um ponto de passagem temporário fora da área de trabalho de outra máquina. A Doosan Robotics não é responsável por quaisquer danos no robô ou noutro equipamento causados por erros de programação ou falha do robô.
-
O pendente de cadela tem um botão de parada de emergência. Em caso de emergência, prima o botão de paragem de emergência para parar o robot.
Scroll conditional content 1m/hseries Scroll conditional content 2aseries Scroll conditional content 3eseries Scroll conditional content hidecontents Scroll conditional content tet