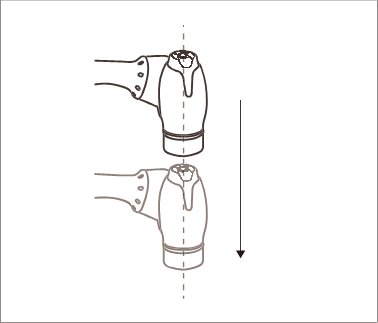
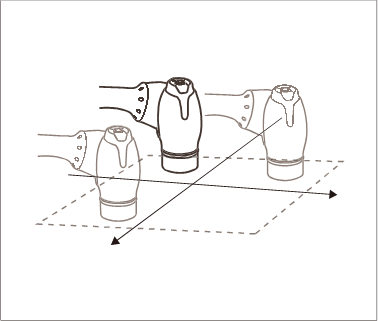
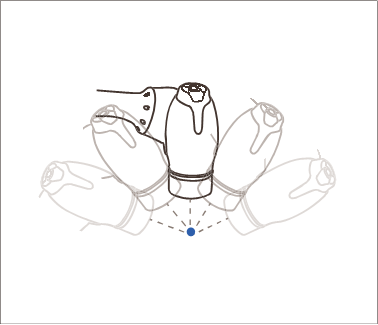
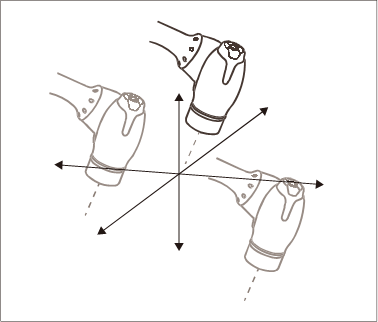
Pode alterar manualmente a postura do robot premindo e mantendo premido o botão de guia da mão do Cockpit ou o botão de configuração do utilizador.
|
No. |
Item |
Descrição |
|---|---|---|
|
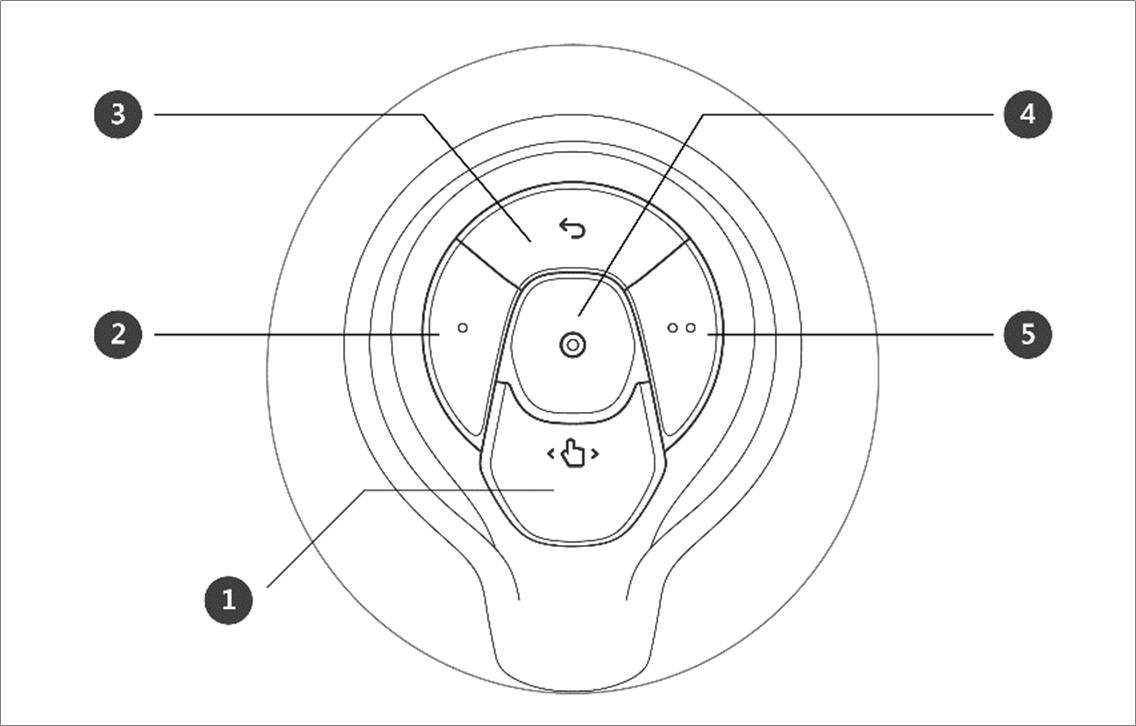
1 |
Botão de orientação da mão |
O robot pode ser posicionado livremente em todas as direções. |
|
2,5 |
Botão de configuração do usuário |
A posição do robot pode ser alterada entrando diretamente na sua posiçãopelas condições de imobilização correspondentes ao modo atribuído.
(2.12.2-pt_PT) Configurar o Cockpit Para obter mais informações sobre como configuraresta configuração, consulte . |
|
3 |
Botão Cancel (Cancelar) |
Eliminar a pose guardada mais recentemente. |
|
4 |
Botão Guardar pose |
Guarda a pose atual do robô. (2.12.2-pt_PT) Definir um Ponto de Trabalho para um Comando de Especialidade utilizando um botão Cockpit Consulte para obter mais informações. |