optional NORMAL 5 min
Sub significa subrotina. Uma sub-rotina é um processo que salva o número de etapas em um programa chamando uma peça duplicada mais de uma vez e, em seguida, chamando essa peça conforme necessário separadamente.
-
O Doosan Robot fornece o Subcomando e o comando CallSub para chamar o subcomando correspondente.
-
O subcomando é o mesmo que a função de definição da linguagem Python.
-
O comando Sub deve ser adicionado fora do início (MainSub) e do fim (EndMainSub) do comando Principal.
-
O Subcomando pode ser usado para simplificar o comando Principal, bem como a iteração. Usando o subcomando corretamente, você pode determinar intuitivamente o que está acontecendo atualmente na instrução Principal.
-
Você pode usar o Subcomando para executar testes de unidade em uma unidade de subinstrução.
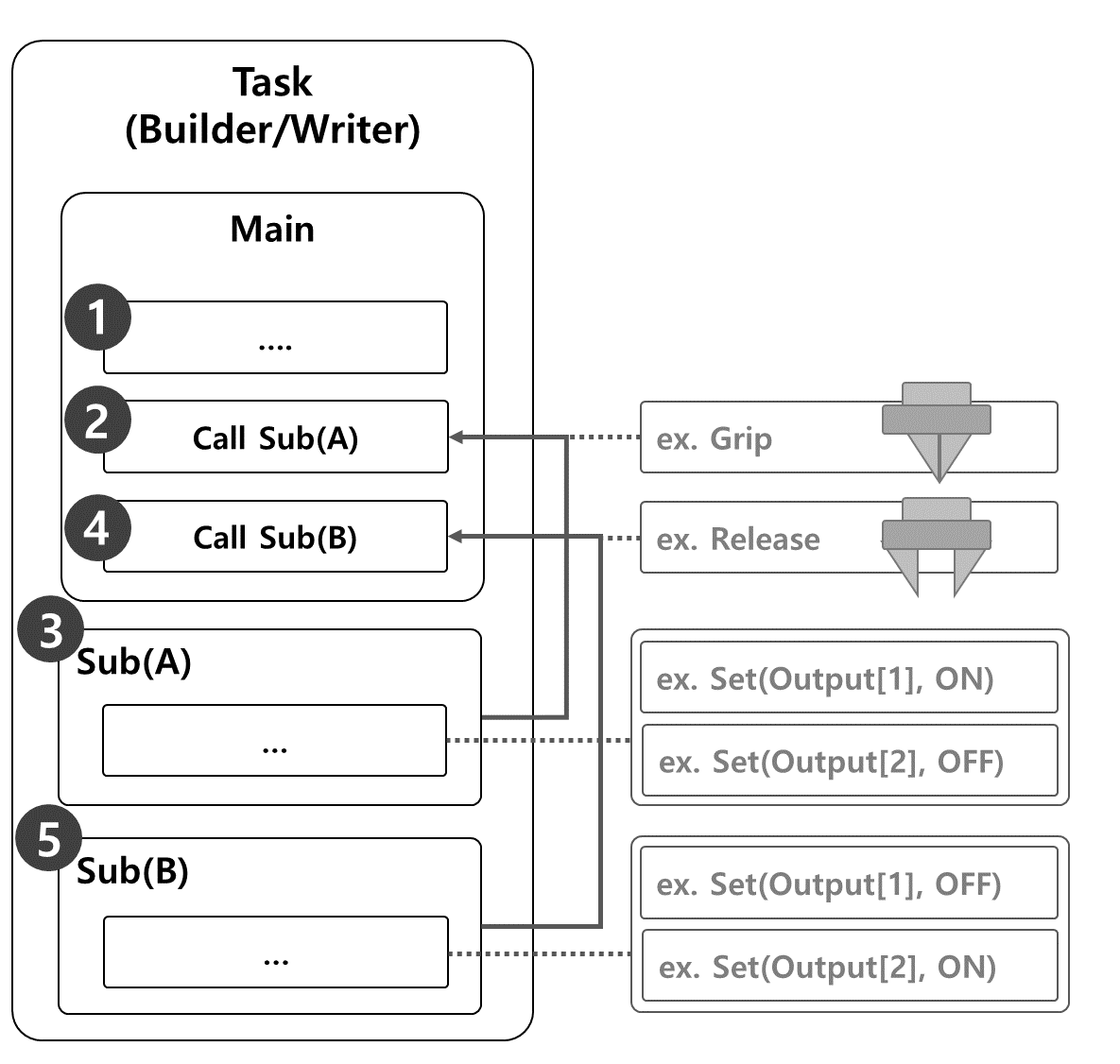
No exemplo em que as ações de liberação e aderência da garra são implementadas no robô usando o Subcomando, as seguintes ações são executadas:
-
No comando Principal, o programa de tarefas é executado sequencialmente a partir da primeira linha.
-
Ir para Sub(A) chamada de Sub-chamada.ExemploPrograma: Invoque a subrotina Grip.Robô: Nenhuma ação
-
A sub (A) está ativada. Depois que todas as subinstruções se alinharem em ordem, retorne à instrução Principal e execute a seguinte linha:ExemploPrograma: Executa uma linha sequencialmente dentro da sub-rotina Grip. Defina Output [1] (Saída) para On (Ligado) e Output [2] (Saída) para Off (Desligado) utilizando o comando SET (Definir).Robô: A garra montada no robot efetua uma operação de aderência.
-
Vá para Sub(B) chamada por Sub-chamada.ExemploPrograma: Chame a sub-rotina Liberar.Robô: Nenhuma ação
-
O Sub (B) é ativado. Depois que todas as subinstruções se alinharem em ordem, retorne à instrução Principal e execute a seguinte linha:ExemploPrograma: Executa uma linha sequencialmente dentro da sub-rotina Grip. Defina Output [1] (Saída [1]) para Off (Desligado) e Output [2] (Saída [2] para On (Ligado) utilizando o comando SET (Definir).Robô: A pinça montada no robot liberta-se.
Adicionando subcomandos
-
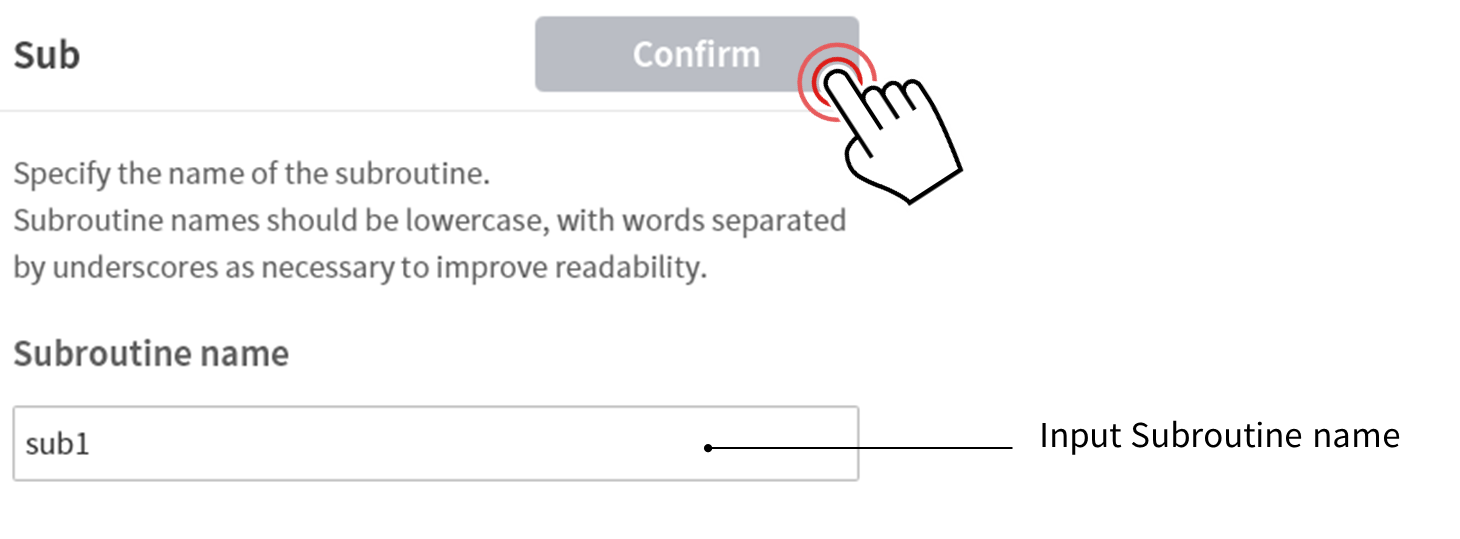
Adicione o Subcomando no Construtor de Tarefas ou no Gerador de Tarefas.
-
Crie um nome de sub-rotina.
-
Prossiga para confirmar.
Adicionando comandos CallSub
-
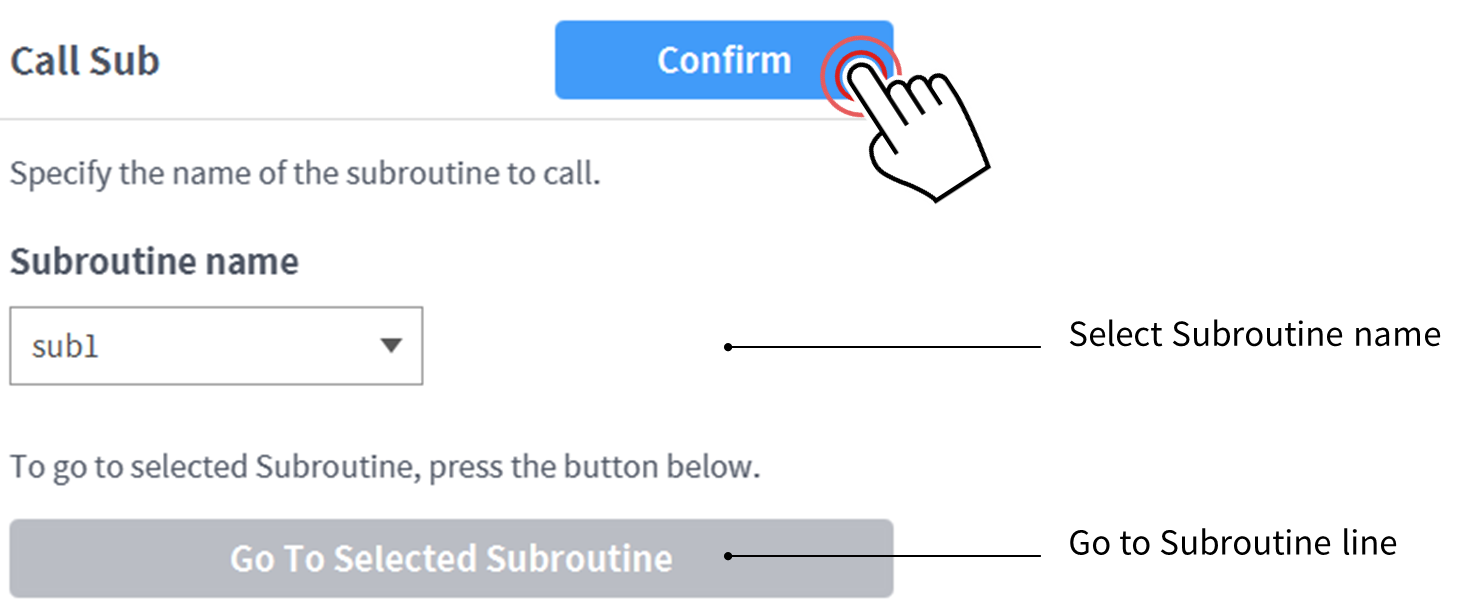
Adicione o comando Call Sub no Task Builder ou no Task Writer.
-
Selecione o nome da sub-rotina registado com o subcomando.
-
Prossiga para confirmar.
-
Se o programa de tarefas tiver um longo número de linhas, pode ser difícil encontrar sub-rotinas. Nesse ponto, você pode tocar em Ir para a sub-rotina selecionada nas Propriedades do comando CallSub para mover o foco para a linha desse subcomando.