Para mover o robot para um ângulo específico:
-
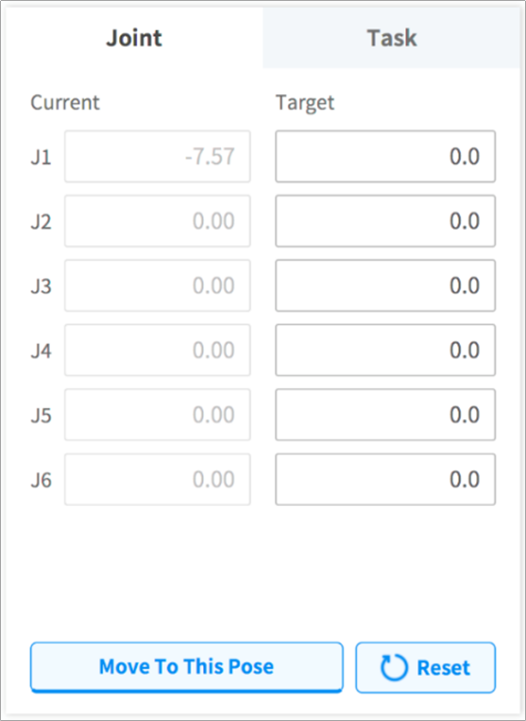
Selecione o separador Movimento e , em seguida, selecione o separador Juntas.
-
Introduza o ângulo alvo da junta do robot.
-
Ative o modo real.

-
Mantenha premido o botão Move to apropriado position(Mover para a posição adequada) para ajustar o ângulo de articulação do robot.