optional hard 20 min
Controle de Força e Controle de Conformidade são funções que controlam as forças do robô. Se adicionar comandos de movimento, também pode controlar forças ao mesmo tempo que move o movimento. Existem diferenças entre os métodos de controlo adaptável e de controlo de força:
-
Controlo de conformidade
-
Sob o controle de aclimatação, o TCP final do robô se adaptará à força externa e, quando a força externa for removida, uma força será gerada para retornar o robô original à posição em que ele deve estar e passar para essa posição.
-
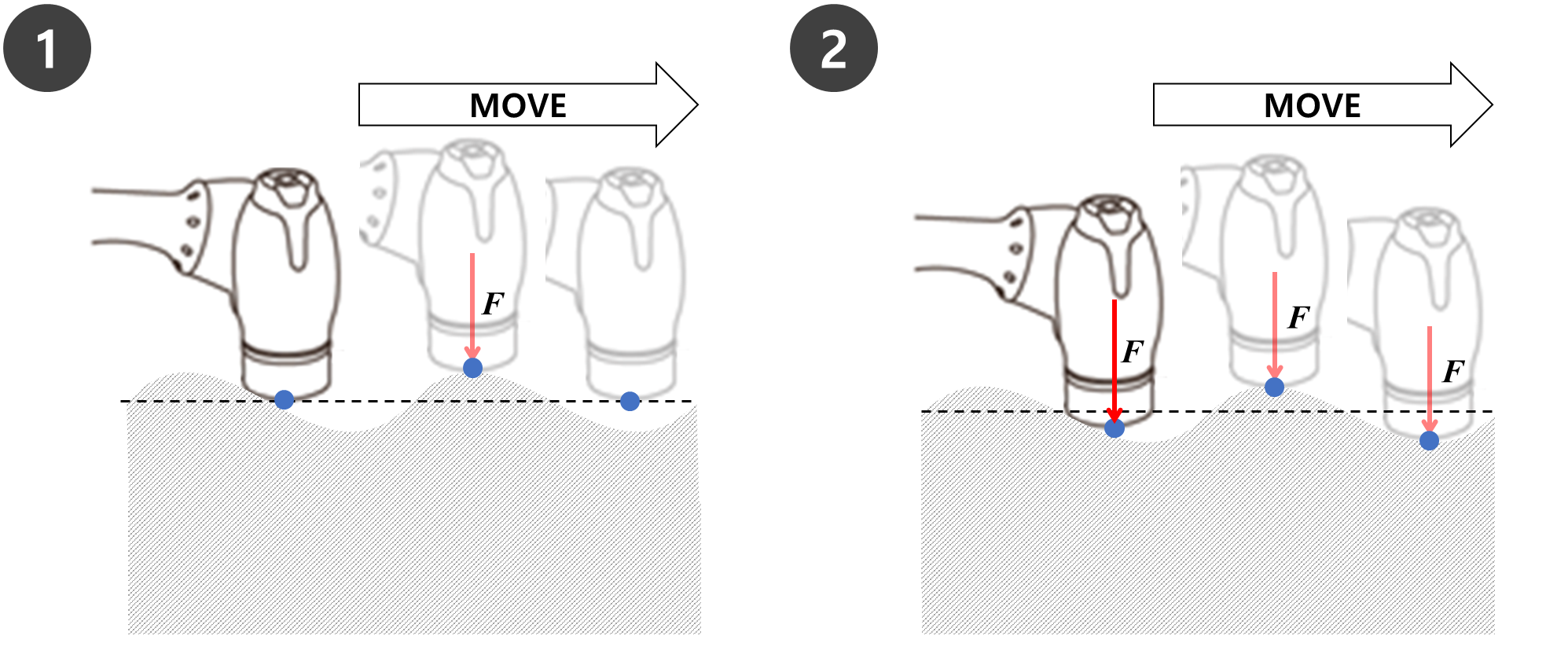
Para utilização quando quiser mover o robot e a superfície sem o quebrar enquanto se desloca em linha reta em superfícies irregulares. Pode ser utilizado para evitar colisões inesperadas nas proximidades da peça de trabalho.
-
-
Controlo de força
-
O controle de força força força força o TCP da ponta do robô. Uma vez que a aceleração é gerada na direção em que a força ocorre, o robot move-se simultaneamente na direção da força, bem como na direção do movimento.
-
Quando em contacto com um objeto, a força é aplicada ao objeto até que a força definida e a força de reação do objeto estejam equilibradas.
-
Isto pode ser utilizado quando pretender aplicar uma força constante à superfície quando se desloca em linha reta em superfícies irregulares. Pode ser usado para aplicações que requerem constante impulso e movimento, como polimento.
-
Cuidado
O controle de conformidade e o controle de força podem ser afetados por singularidades, o que pode causar vibrações. Por favor, seja cauteloso e evite usá-los perto de singularidades.
Saber
Os comandos Compliance e Force operam com relação ao sistema de coordenadas atualmente definido. O sistema de coordenadas padrão para uma tarefa é o sistema de coordenadas Base, que pode ser alterado através do comando SET.
-
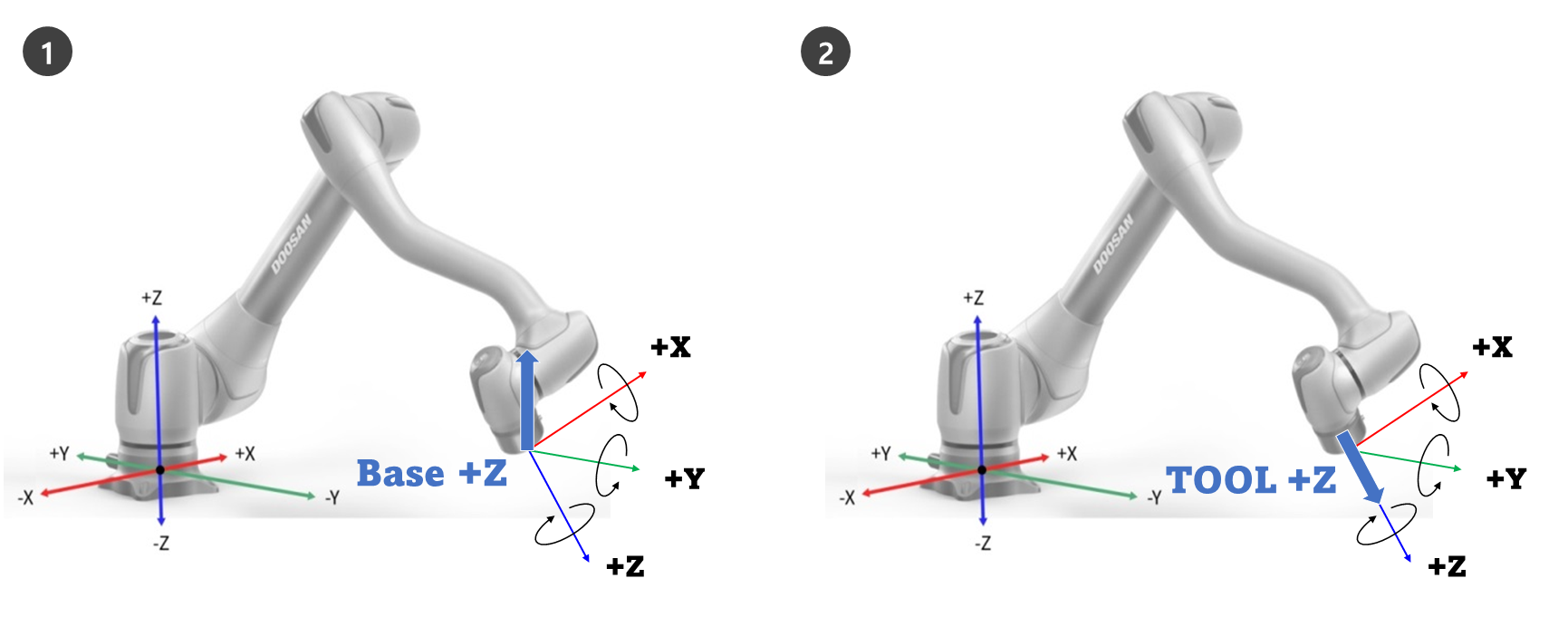
A direção em que o controle de força/aclimatação opera na direção Z em relação ao sistema de coordenadas Base é mostrada na Figura 1.
-
A direção em que o controle de força/aclimatação opera na direção Z em relação ao sistema de coordenadas da Ferramenta é mostrada na Figura 2.
Controlo de conformidade
O Controlo de Conformidade é a capacidade de se adaptar às forças externas com base na rigidez definida quando é aplicada uma força TCP no final do robô. O equilíbrio de força no ponto alvo é um método de controlo no qual ocorrem forças de reação quando ocorre uma deslocação em relação ao ponto de equilíbrio e, sob controlo adaptável, as extremidades do robot movem-se como ferro de água.
-
Se utilizar o controlo de movimento sozinho, o objeto avariado pode partir-se.
-
Embora o robô Doosan pare em segurança em caso de colisão, dependendo das definições do utilizador, tais como Limites de Segurança > Sensibilidade de Colisão, podem ocorrer as seguintes situações:
-
-
Ao utilizar o controlo de movimento, se ligar o controlo de aclimatação, o robot move-se em conformidade com o objeto de colisão.
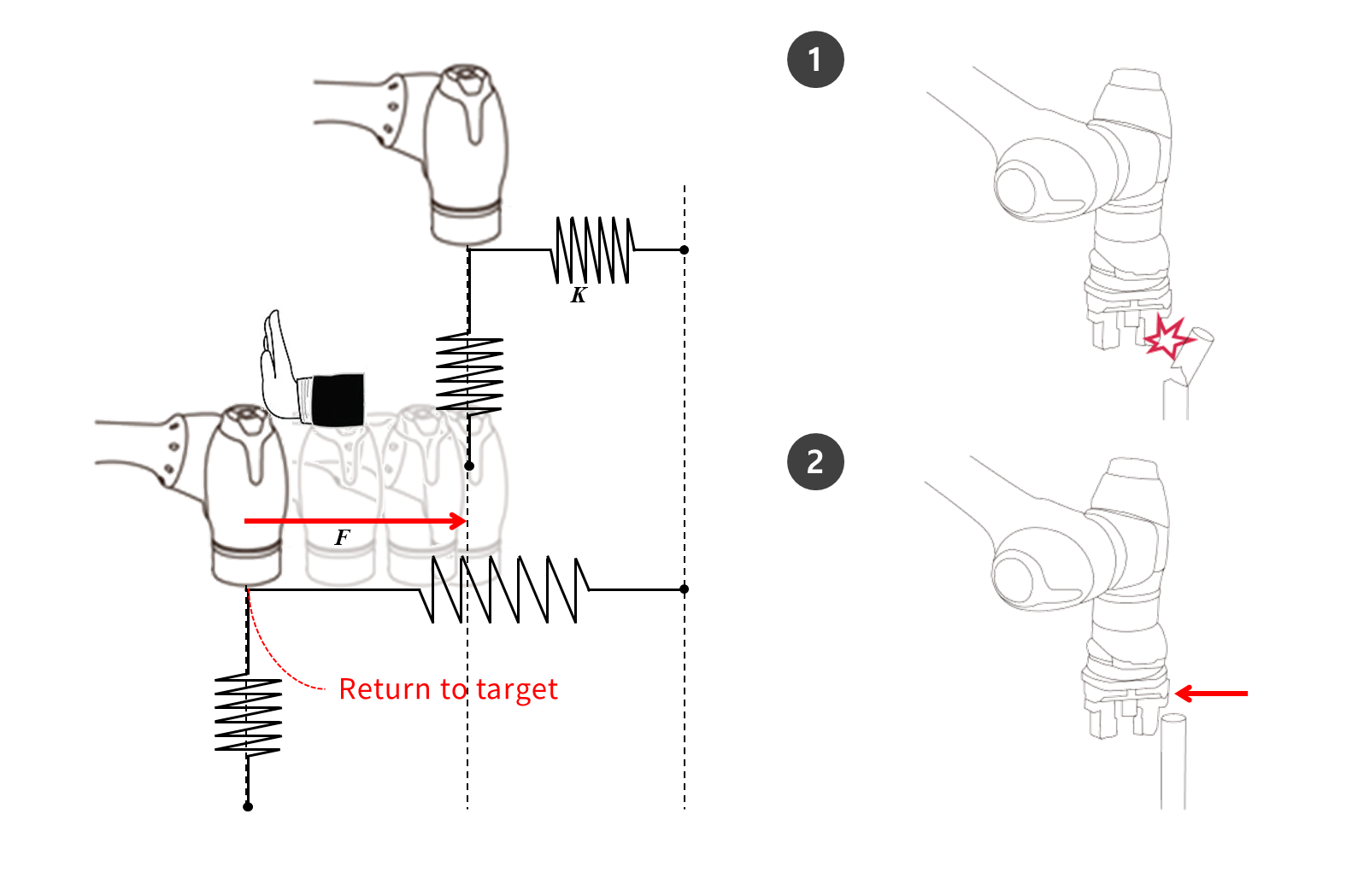
F (força externa), K (rigidez), X (distância de deslocação), a fórmula é:
-
F = K * X
-
K = F / X
-
X = F / K
Utilizando a fórmula acima, a rigidez do controlo da aclimatação é definida para 1000 N/m e a força externa produzida pela movimentação do robô 1 mm será de 1 N.
-
F=1000N/m*0.001m=1N (0.001m=1mm)
Saber
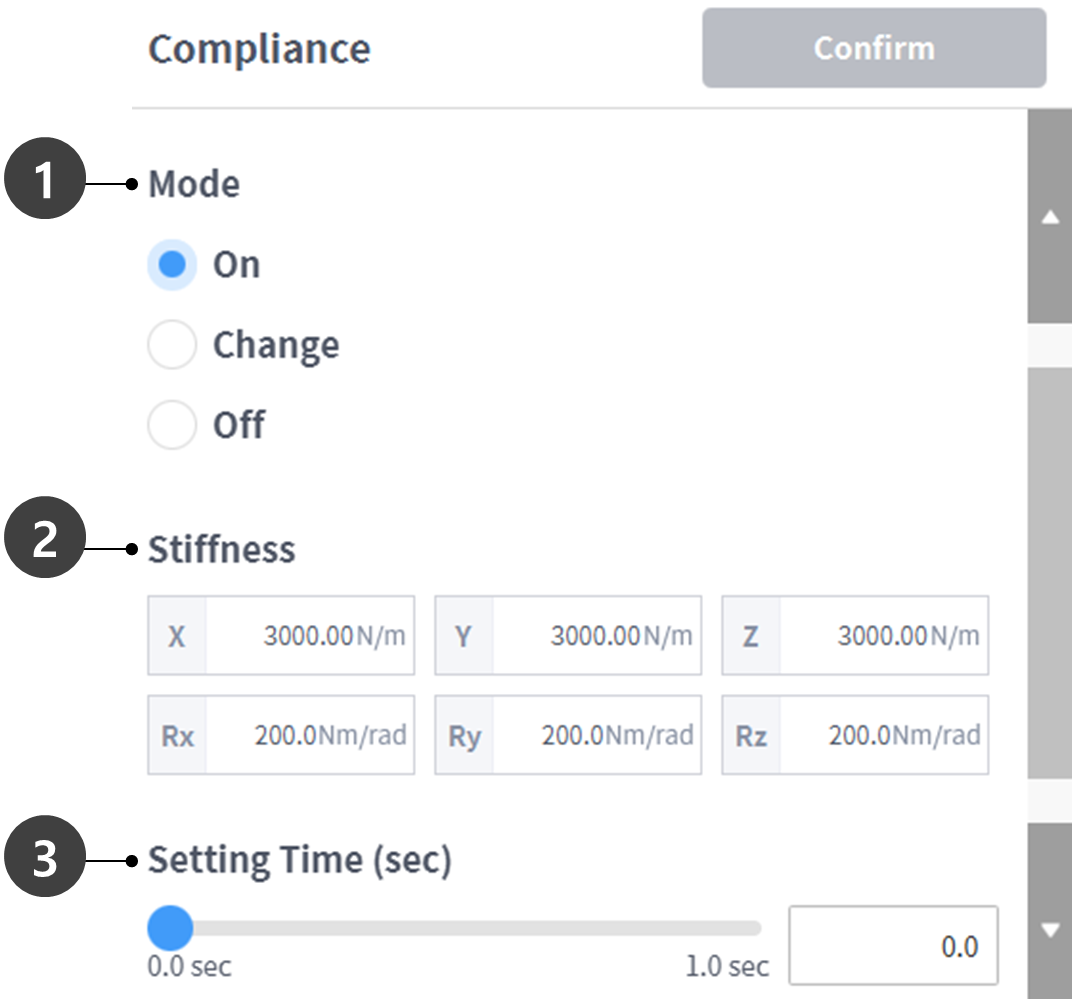
Os valores a seguir podem ser definidos nas Propriedades do comando Conformidade.
-
Modo
-
Ligado: Ativar o controlo adaptável
-
Alterar: Altera a rigidez quando o modo de conformidade está ativado
-
Desligado: Desativar o controlo de conformidade
-
-
Intervalo de definição de rigidez
-
M/H Series : Translation(0~20000N/m), Rotation(0~1000Nm/rad)
-
A Series : Translation(0~10000N/m), Rotation(0~300Nm/rad)
-
Quanto mais baixa for a definição de rigidez, mais suave responde às forças externas e quanto mais tempo demora a regressar ao alvo
-
-
Acertar a hora
-
O tempo necessário para que o valor de rigidez atinja o valor de rigidez definido no valor de rigidez atual (0 a 1s)
-
Cuidado
-
O peso da ferramenta e o TCP (Ponto Central da Ferramenta) devem estar definidos corretamente. Definições incorretas de peso da ferramenta fazem com que o robot detete o peso da ferramenta como uma força externa, provocando erros posicionais com o comando de conformidade ligado.
-
A tensão no conjunto de vestuário pode fazer com que o binário externo seja aplicado ao robô. Por isso, instale o conjunto de vestuário com cuidado.
-
A conformidade não pode ser ativada ou desativada enquanto o movimento assíncrono ou de mistura estiver em execução.
-
Apenas é permitido movimento linear quando o comando de conformidade está ativado. Não são permitidos movimentos conjuntos como MoveJ e MoveSJ.
-
Não é possível alterar o peso da ferramenta ou o TCP enquanto o comando Conformidade estiver ativado.
-
Quando o comando de conformidade está ligado, a posição alvo pode não ser atingida com precisão devido ao binário gerado durante o movimento. Por isso, recomenda-se que ligue o controlo de aclimatação perto do ponto-alvo. Em alternativa, pode definir o valor de rigidez para um valor grande para minimizar erros posicionais.
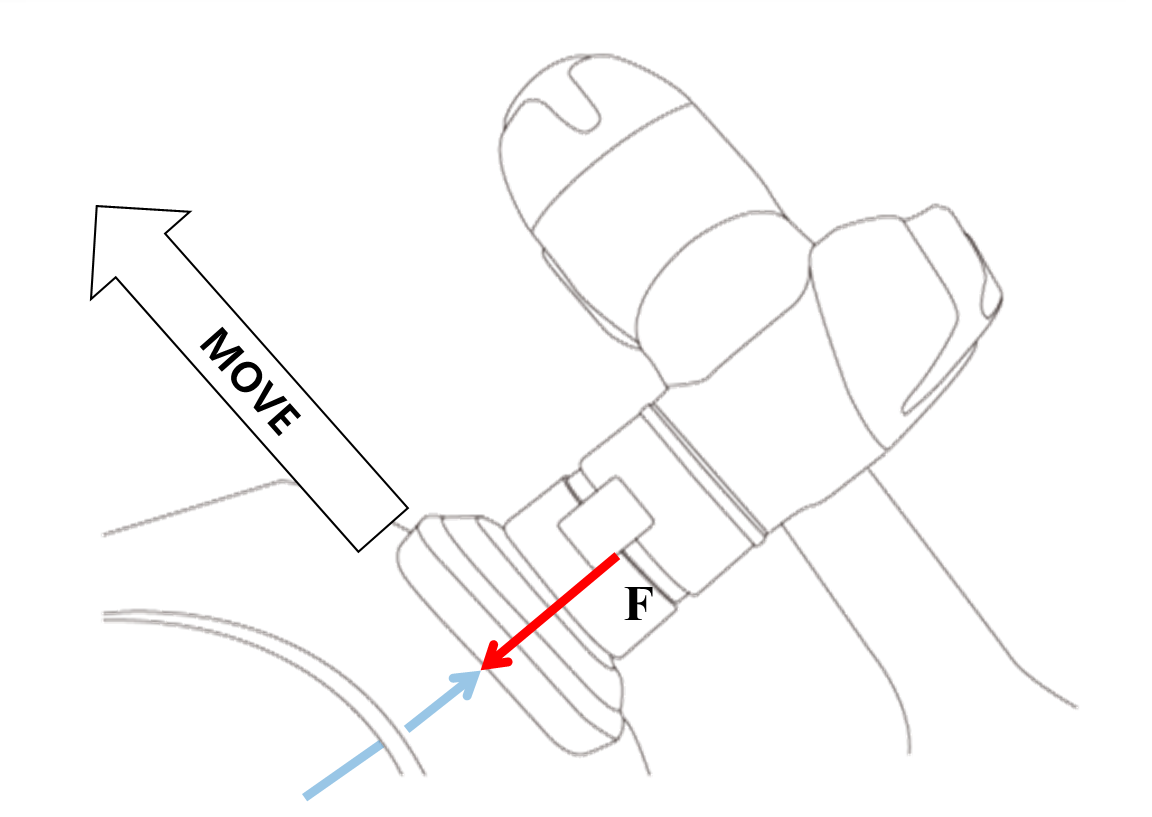
Controlo de força
O controlo de força é a capacidade de aplicar forças direcionais de controlo de força até que a força definida e a força de reação estejam equilibradas
-
Desloca-se na direção da força definida e mantém a força introduzida (N) ao entrar em contacto com um objeto
-
Controle o movimento numa direção diferente da direção da força enquanto aplica uma força constante
-
A definição mínima é de 10 N, com uma resolução de 0.2 N para um controlo preciso
-
Controlo de força não disponível na área de singularidade
-
Em geral, ao utilizar o controlo de força, o controlo de força também é utilizado em conjunto com o controlo adaptável para se adaptar à força exterior
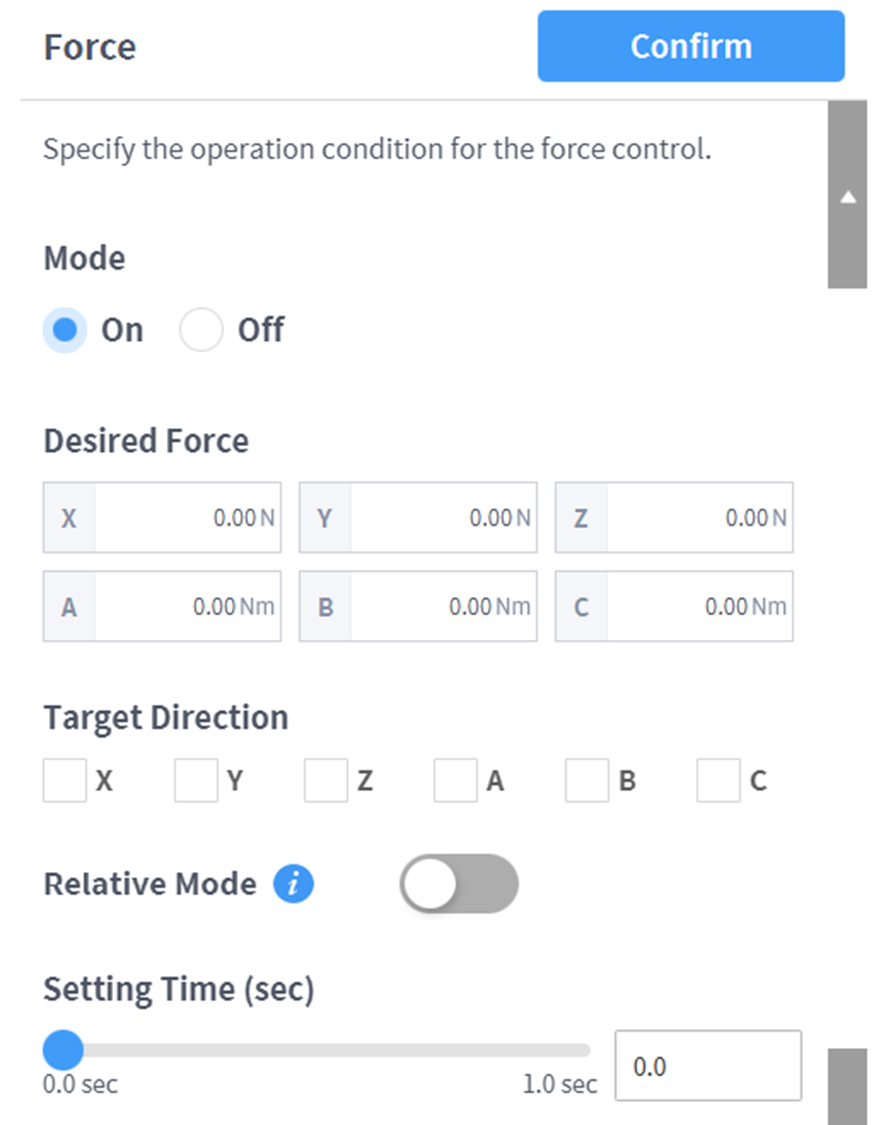
Saber
Os valores a seguir podem ser definidos na propriedade do comando Forçar.
-
Modo
-
Ligado: Controlo de força ativo
-
Desligado: Controlo de força desativado
-
-
Intervalo de definição de força pretendido
-
X, Y, Z: 10 a (máximo para cada robô) N
-
A, B, C: 5 a (máximo para cada robô) Nm
-
Consulte para obter o valor máximo de força Parâmetros de segurança gamas inferiores e inferiores e valores predefinidos.
-
-
A direção alvo
-
Move-se para o valor alvo em cada direção selecionada.
-
São possíveis várias seleções.
-
Depois de definir a força, a direção tem de ser definida para que o controlo de força funcione.
-
Se a direção de uma das direções selecionadas múltiplas conseguir primeiro o equilíbrio de força quando a força alvo é atingida, continuará a mover-se até que o valor alvo seja atingido para as direções restantes.
-
-
Modo relativo
-
Quando este modo é ativado, a força externa que atualmente atua no robô é calibrada para zero, melhorando a precisão do controle de força.
-
Ao desativar o modo relativo, a força real aplicada ao alvo é igual à soma da força definida e da força externa.
-
Ao ativar o modo relativo, a força real aplicada ao alvo é igual à força definida.
-
-
Sob controlo de força, podem ocorrer erros dependendo da postura ou das forças externas.
-
Sob controlo de força, a posição alvo pode não ser atingida com precisão. Por isso, ative o controlo de força perto do ponto alvo.
-
-
Acertar a hora
-
O tempo que o valor de Força demora a atingir o valor de força definido no valor de força atual (0 a 1s).
-