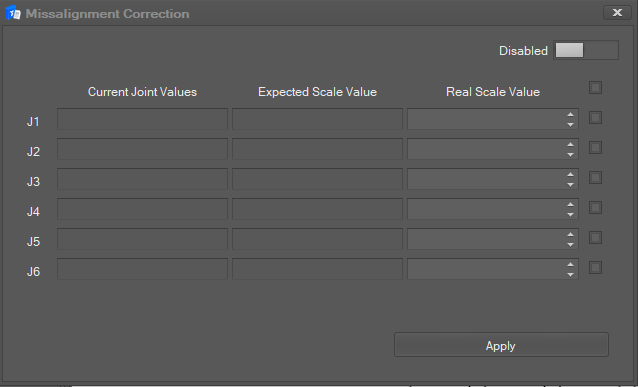
The E model provides a function to correct when missalignement occurs.
Press the “Disabled” toggle button to enable inverter power.
Check the engraved scales on each axis of the robot, enter the current robot scale value, and set it to correct the robot's missalignement .
After calibration, the robot must be restarted for normal operation.